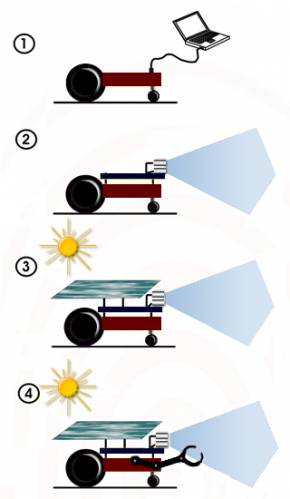
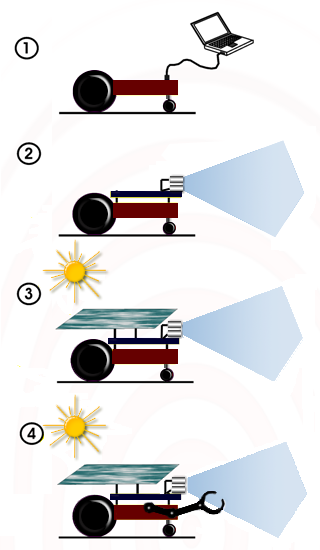
Рис. 1
Иными словами она не
думает что делает, а просто ездит и объезжает препятствия. На втором этапе к
платформе подключим мастер плату 2 рис 1, которая будет думать. Мысли на мастер
плате появятся на основании данных от фотодатчиков или видеокамеры (например,
фотокамера от ИК мышки) или данные от других датчиков.
На третьем этапе возникнет
вопрос о питании аккумуляторов. Мы, как и все конструкторы, постараемся
адаптировать к платформе солнечную батарею 3 рис 1. И только на четвертом этапе
к платформе добавим манипуляторы 4 рис 1. И тогда, получится верный помощник
человека – робот с манипуляторами. Такой робот будет вполне полноценным. Если
мы наделим его интеллектуальной программой, то робот сможет сам выполнять
поставленные задачи.
Как сконструировать мини платформу – робота? Прежде всего
необходимо найти электро двигатели. Узнать какое у них питание и максимальный
ток потребления. Эту операцию
нетрудно выполнить на любом лабораторном блоке питания. Зная, значение тока
потребляемого двигателем, подбираются реле. В данном случае выбраны очень
надежные реле фирмы Omron [1]. Эти реле имеют маленькие габариты и вес, но
могут коммутировать значительный ток.
При автономном управлении платформой надо
знать, какую траекторию движения будет она выполнять. Для простоты, выберем
направление движения прямо, в случае столкновения с препятствием, будет
выполнен маневр обхода препятствия. Вот и вся схема. Итак, что будет управлять
платформой? Микроконтроллер в виде одной микросхемы, программа, написанная для
определенной ситуации и схема определения препятствия. В простейших схемах,
препятствия определяются микро выключателями.
При столкновении микровыключатели замыкают контакты и микроконтроллер
изменяет траекторию движения платформы. Микроконтроллер включает реле через
транзисторы рис 2 и отсчитывает промежутки времени. Можно задать траекторию
движения платформы, разбив участки пути на временные интервалы. Зная скорость
платформы, задается время исполнения команды, например, влево вперед и тем
самым достигается движение по заданной траектории. В простейшем случае, мы
зададим движение только вперед. Для сложных ситуаций можно использовать линию
связи с дополнительной платой управления по линии приемо- передатчика USART. Дополнительная плата
(обычно называют мастер) будет решать, какое направление движения выбрать.
Платформа будет выполнять команды. Платформа имеет задний привод, без
управления поворотом передних колес. Маневр осуществляется за счет
попеременного вращения задних колес.
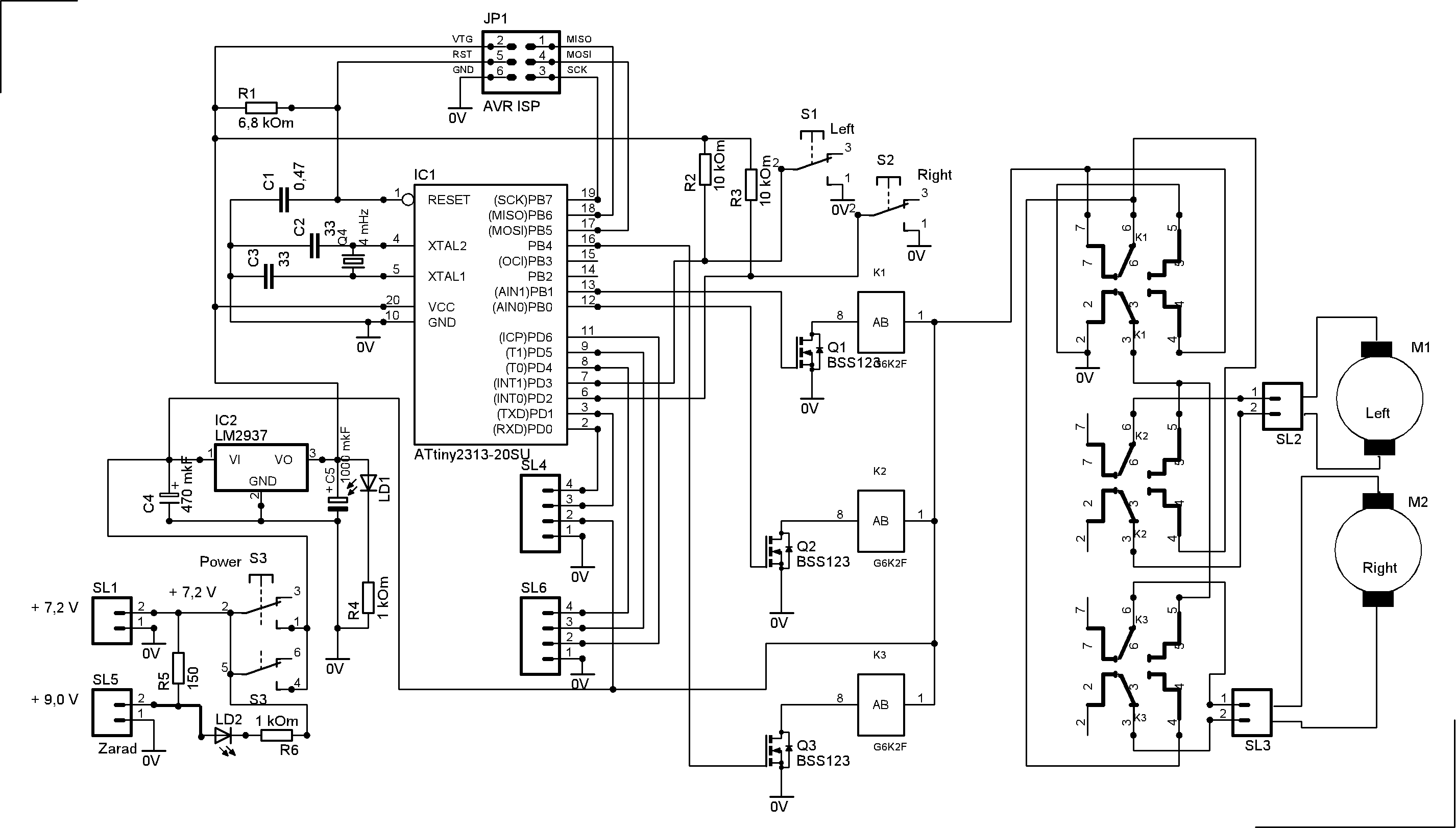
3.ПРИНЦИПИАЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ СХЕМА
Электрическая схема приведена на рис.2. Для
управления схемой выбран распространенный микроконтроллер (МК) [2] ATtiny2313. Электро двигатели позаимствованы от старых CD-ROM, напряжение
питания 5 В, ток 45 мА. Для электро
питания схемы выбраны два аккумулятора 3,6В 300 мА/час. Аккумуляторы
соединяются последовательно, образуя источник тока 300 мА/час, и напряжением
7,2 В. Этого достаточно для управления роботом в течении получаса. Источник
подключается к разъему Sl1.
Питание схемы подается после включения выключателя
S3. Для стабильной работы МК IC1,
существует стабилизатор IC2,
который формирует стабильное напряжение 5,0 В. Подачу питания сигнализирует
светодиод LD1. IC1 имеет цепь сброса R1, C1 для установки МК в начальное
состояние. Кварцевый резонатор 4,0 мГц Q4 для стабильной работы МК. Управление электродвигателями
осуществляется через транзисторы Q1, Q2, Q3. Транзисторы включают,
выключают реле К1, К2, К3. Реле К1 коммутирует полярность источника питания,
для электро двигателей. Реле К2 включает левый двигатель М1, реле К3 включает
правый двигатель М2.
Для определения столкновения с препятствием, установлены
контактные микро выключатели S2, S3. Для программирования МК по ICP,
предусмотрен разъем JP1. Для связи с другим МК по USART,
предусмотрен разъем SL4.
Во время испытаний, аккумулятор полностью разрядится. Для зарядки аккумулятора
предусмотрен разъем SL5.
Пока будет протекать ток заряда аккумулятора, будет светится светодиод LD2. Как только заряд
аккумулятора выполнен, светодиод будет медленно тускнеть.
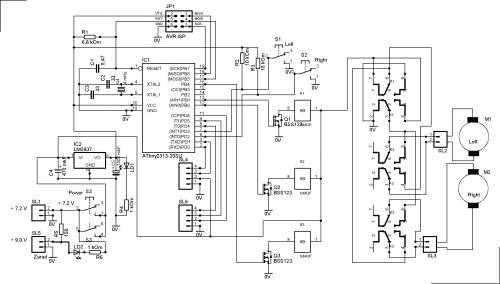
Рис. 2. Электрическая схема. Нажать для увеличения.
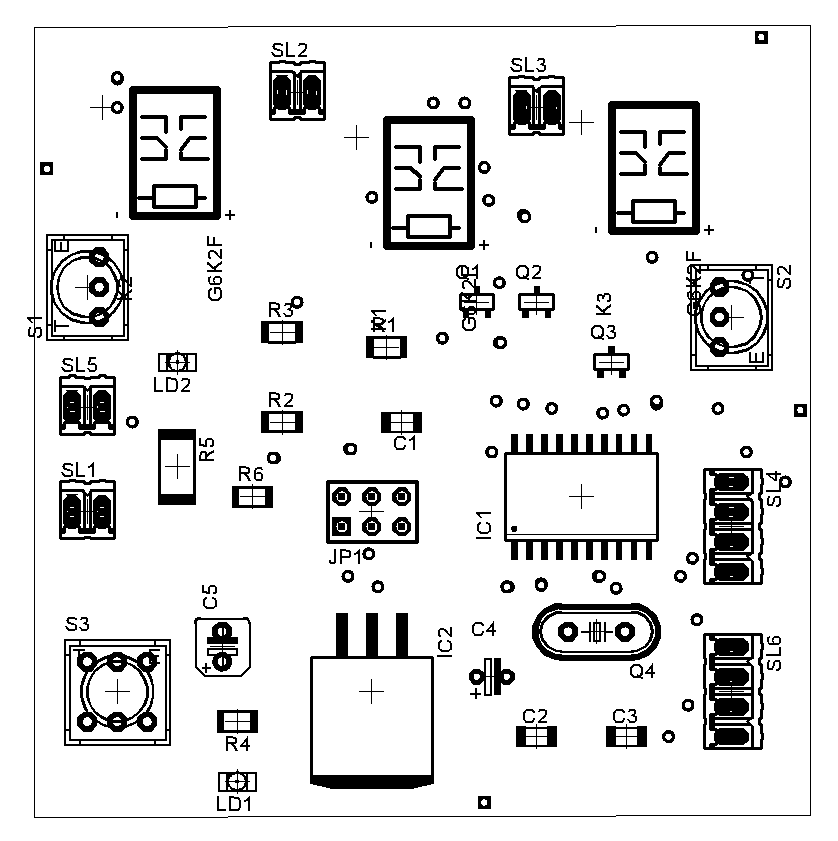
Рис.3.Чертёж монтажной платы.
Рис
3 имеет габариты 45Х60 мм, плата имеет
двухстороннюю разводку платы рис 3 а,б,в и произведена с учетом деталей
поверхностного монтажа. На плату устанавливаются реле К1-К3 Omron6R4-2F
предназначены для поверхностного монтажа, потому они устанавливаются с стороны
разводки платы. Плата удерживается двумя стойками. Она должна быть выполнена из
двух стороннего текстолита или гетинакса, так как имеет разъемы, к которым
соединены источник питания и двигатели. Разъем SL4 для USART и SL5 для подключения внешних датчиков,
может выполнять несущую функцию крепления дополнительной платы мастер. Под
платой, к передней части, устанавливаются микровыключатели фото 1.
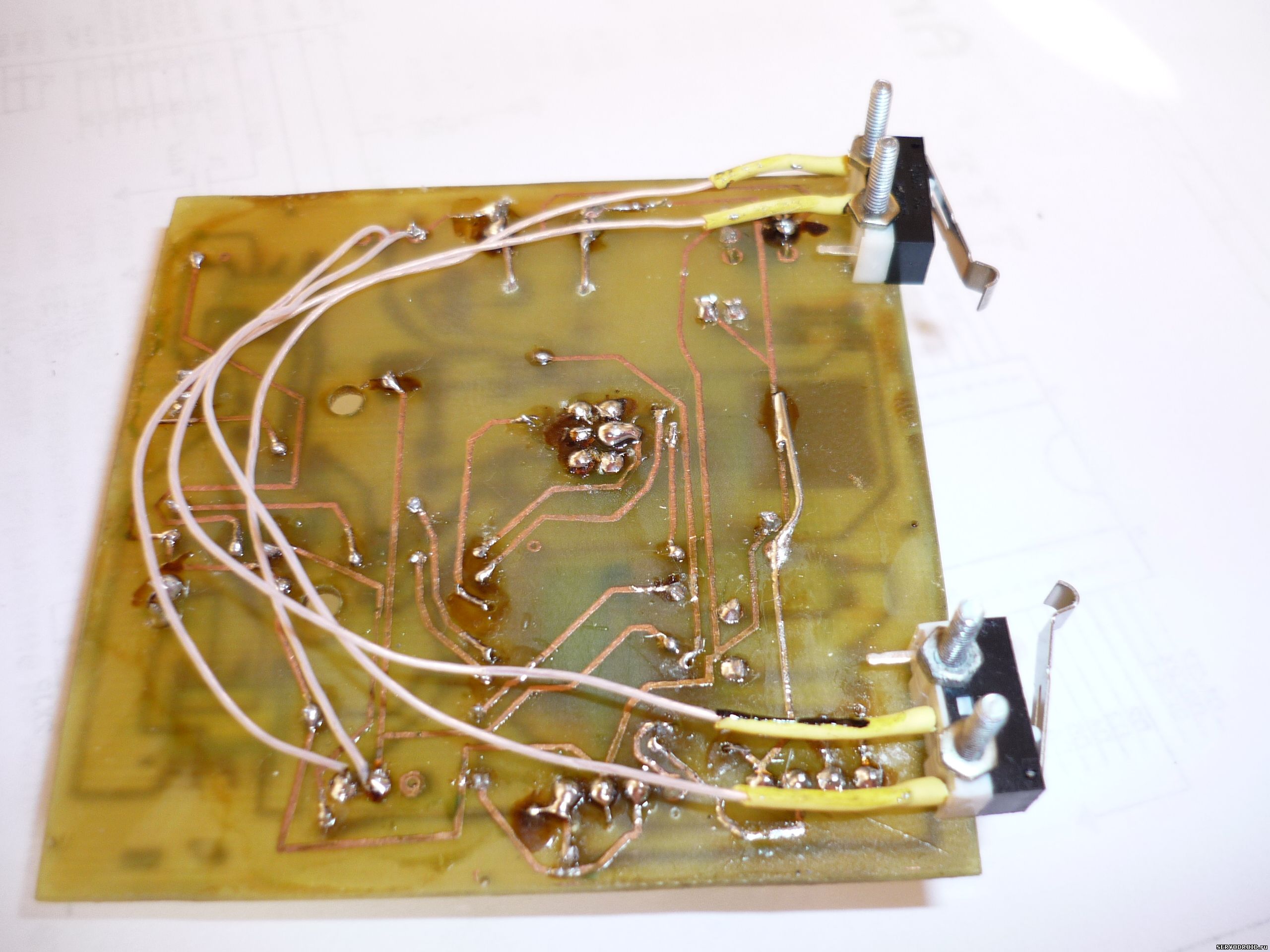
Фото 1.
Для этого в
плате сверлятся четыре отверстия диаметром 1,7 мм. Корпуса микровыключателей
крепятся винтами М1,6 длиной 10 мм. Микровыключатели устанавливаются в
противоположных углах платы, по отношению к их месту установки на монтажной
плате. Это необходимо для того, что бы к микровыключателям присоединить усики
большой длины. Если усики короткие, то при столкновении с препятствием, микровыключатель
не замкнется из-за малого веса робота. С длинными усиками рычаг нажатия
обеспечивает усилие, необходимое кнопке.
4.ДЕТАЛИ И МАТЕРИАЛЫ.
Аккумуляторы можно позаимствовать от мобильных телефонов, или купить
специализированные, для электронных плат. Автор купил LIR3048 3,6V 280 mAh. Электродвигатели
фирмы Mitsumi R-141161 серии М25Е. Остальные детали перечислены в таблице 1.
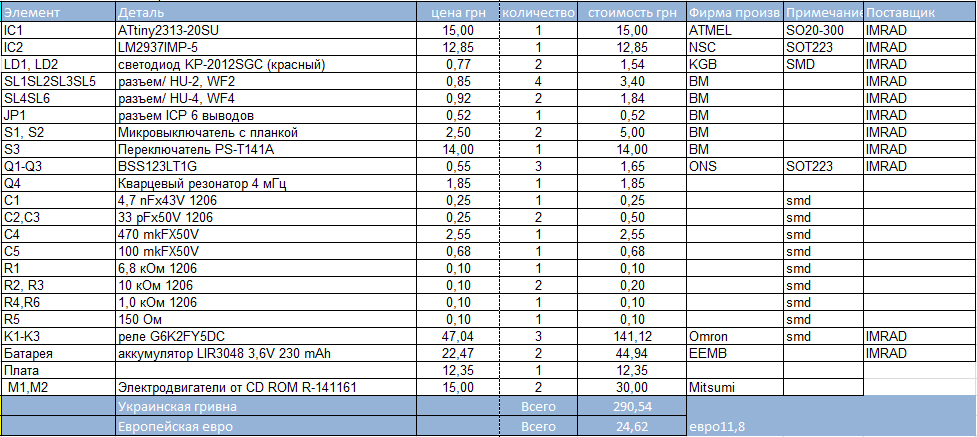
Табл.1. Список радиокомпонентов.
5.СОФТ
Листинг
1 листинг 2 записывается через ISP соединение с компьютера через программатор. Использовался
программатор AVR Dragon.
Программа имеет в начале вектор прерывания, указывающий на адрес
соответствующего прерывания в программе. Далее идет настройка портов ввода –
вывода и маска прерывания, эти настройки указывают в какой конфигурации они
должны быть. Так как программа использует подпрограммы, то настраивается стек,
в котором будет сохранятся адрес, на момент прерывания. В начале программы
формируется траектория движения платформы. В данном случае движение прямо,
влево, вправо. До момента столкновения.
Между маневрами прямо, влево, вправо задается время паузы. Время паузы создается
программно, с помощью подпрограммы zader
которая в свою очередь вызывает подпрограмму zader2 несколько раз. Это
необходимо для регулировки времени паузы. В подпрограмме zader2 организован программно
цикл отсчета чисел, когда заданное число уменьшается до нуля, происходит выход
из цикла. Так поочередно маневр – задержка, выполняется пошагово основная
программа.
Как только робот столкнулся с препятствием, срабатывает контактный
датчик, который замыкает контакты S1 или S2.
Контакты при замыкании формируют нулевой уровень, который поступает на вход МК.
Срабатывает прерывание INT0 или INT1.
Программа прерывается, и переходит по вектору прерывания на заданную
подпрограмму прерывания. В зависимости от подпрограммы прерывания, робот
выполняет маневр назад влево, или назад вправо. После чего подпрограмма
прерывания возвращается в основную программу, на то место, где была прервана
основная программа. Пока робот не обойдет препятствия, он будет выполнять
маневры вперед, назад до бесконечности. Основная задача настроить
последовательность маневров, так что бы робот обошел препятствие.
Исходники находятся в архиве, в конце статьи.
6.КОНСТРУКТИВНОЕ ИСПОЛНЕНИЕ
Платформы
имеет небольшие габариты. Почему? Прежде всего, для сборки робота необходимо
иметь плату управления. Именно габариты платы задают основу платформы. Второй
фактор, это привод платформы. Наиболее распространенные электродвигатели для
платформы, это электродвигатели бывших в употреблении CD проигрывателей. Так
как компьютерная техника постоянно модернизируется, то CD проигрыватели уже
никто не использует. А огромное количество техники попадает на свалку.
В
проигрывателях, достаточно мощный электродвигатель, который может на прямом
приводе двигать платформу. Добавим к выше сказанному: габариты платформы задаются
еще и габаритами электродвигателей. И последний фактор, это аккумуляторы. 70%
веса конструкции составляют аккумуляторы. Хотя аккумуляторы литиевые, все равно,
вес платформы значительно прибавляется. Вот тут и стает вопрос, потянет
электродвигатель тяжелую платформу?
- Вес платформы- тяговая сила двигателей –
эффективность управления, являются основными показателями при создании
платформы. Поэтому необходимо заранее иметь детали и знать характеристики
двигателей, и уже потом начинать сборку конструкции. А лучше всего провести
эксперимент по передвижению платформы, без схемы управления.
Для сборки конструкции понадобятся детали. Первая деталь-
основание, рис 4 изготовлено из жести консервной банки (например, банки от
кофе).
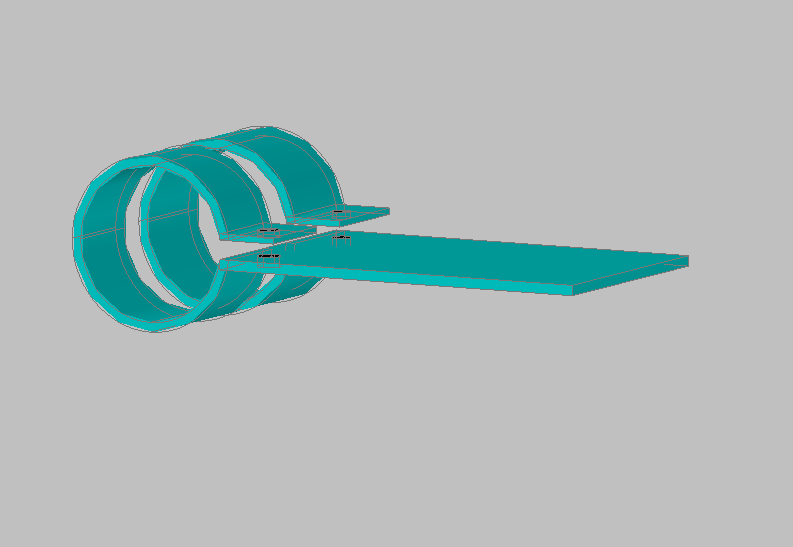
Рис. 4
Две детали привода колес, позаимствованы от кассетного плеера. От привода плеера отрезаны стойки с шестеренками фото 2.
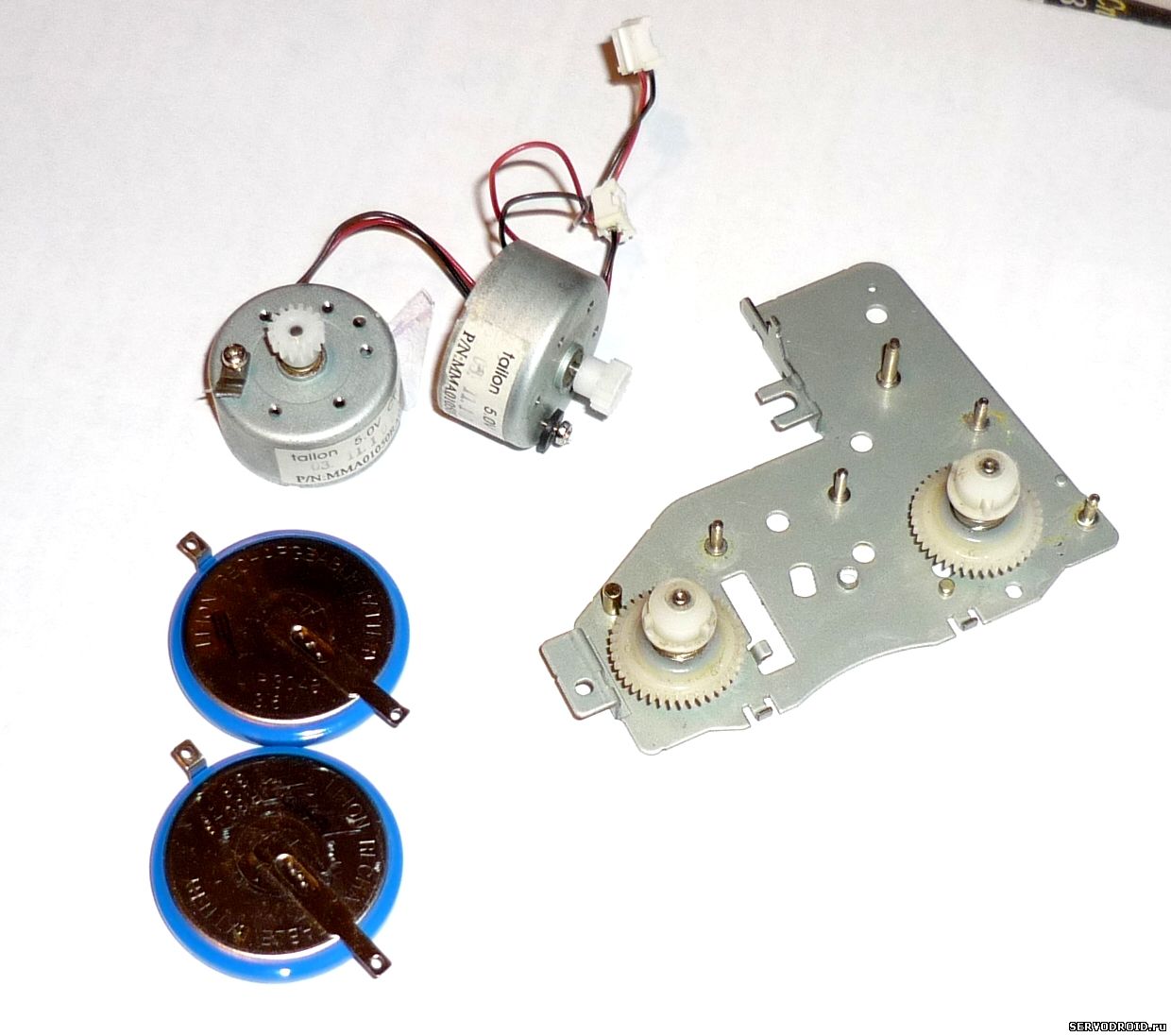
Фото 2
Детали с шестеренками крепятся винтами М1,2 к электродвигателям рис 5. Необходимы два винта М3 длиной 3,5 см и гайки М3. В основании делаются скобы, которые будут удерживать двигатели. Для этого на трубу подходящего диаметра накладываются и сгибаются отводы от основания.
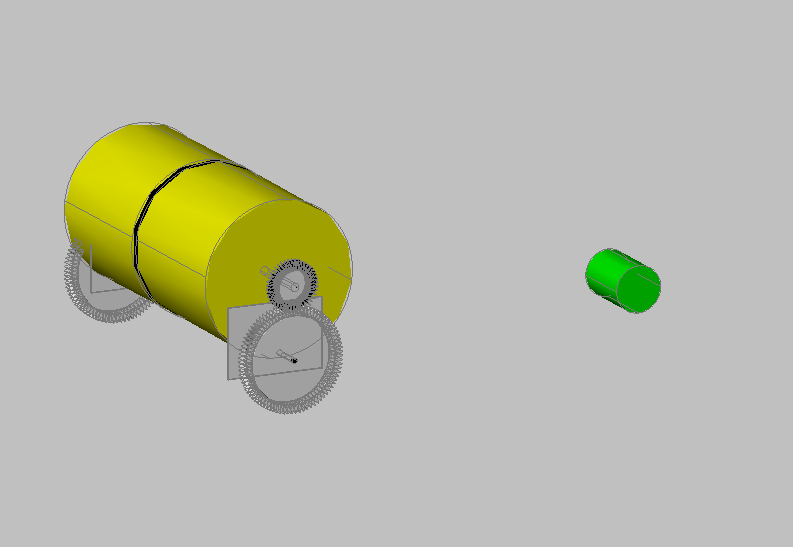
Рис. 5
Винтами сжимаются скобы рис 6.
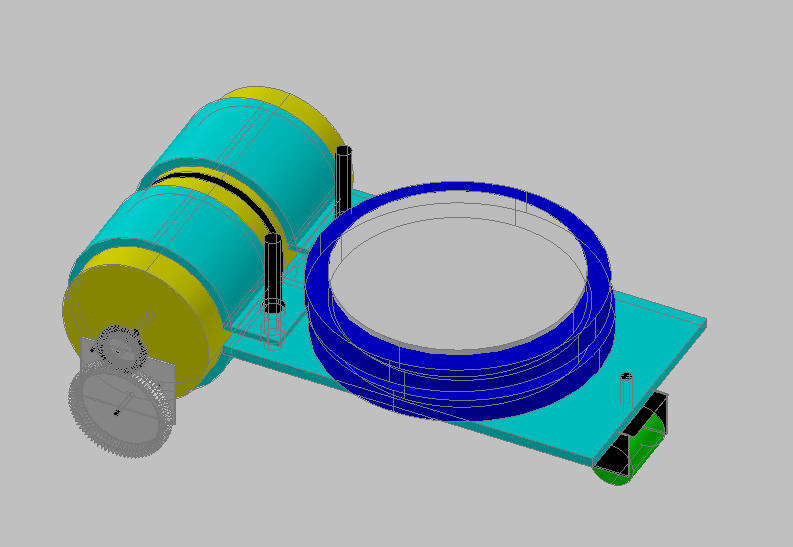
Рис. 6
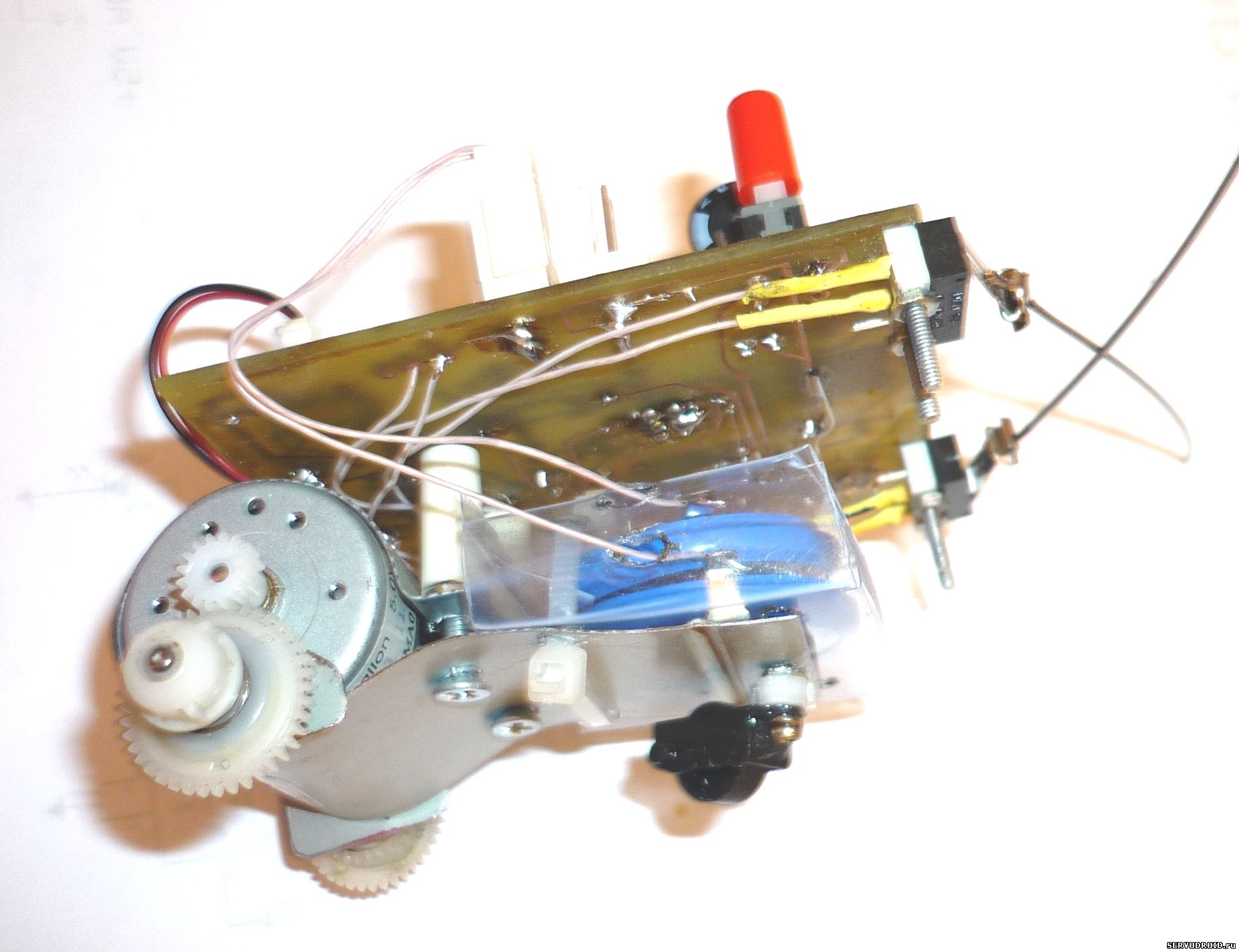
7.СБОРКА И НАСТРОЙКА
Двигатели вставляются внутрь скоб и зажимаются винтами рис 6.
Необходимо что бы двигатели имели соосность осей. Провода от двигателей,
желательно вывести к верхней части платформы, поближе к плате управления. Винты устанавливаются вверх по отношению к
днищу платформы фото 3.
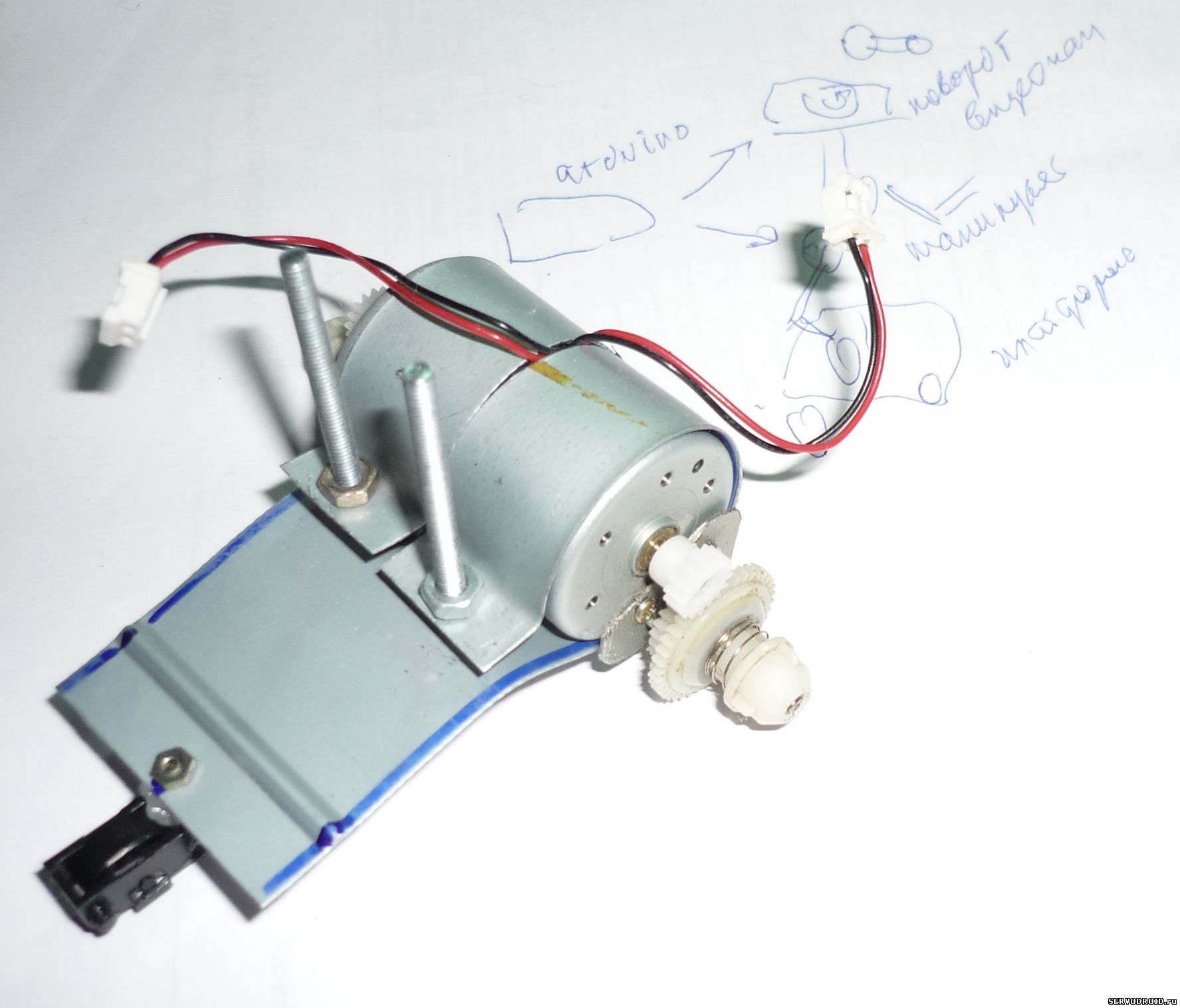
Фото 3.
После
крепления двигателей, устанавливается передняя стойка с колесиком. Далее на
основание крепится стяжками аккумуляторы рис 6 фото 4.
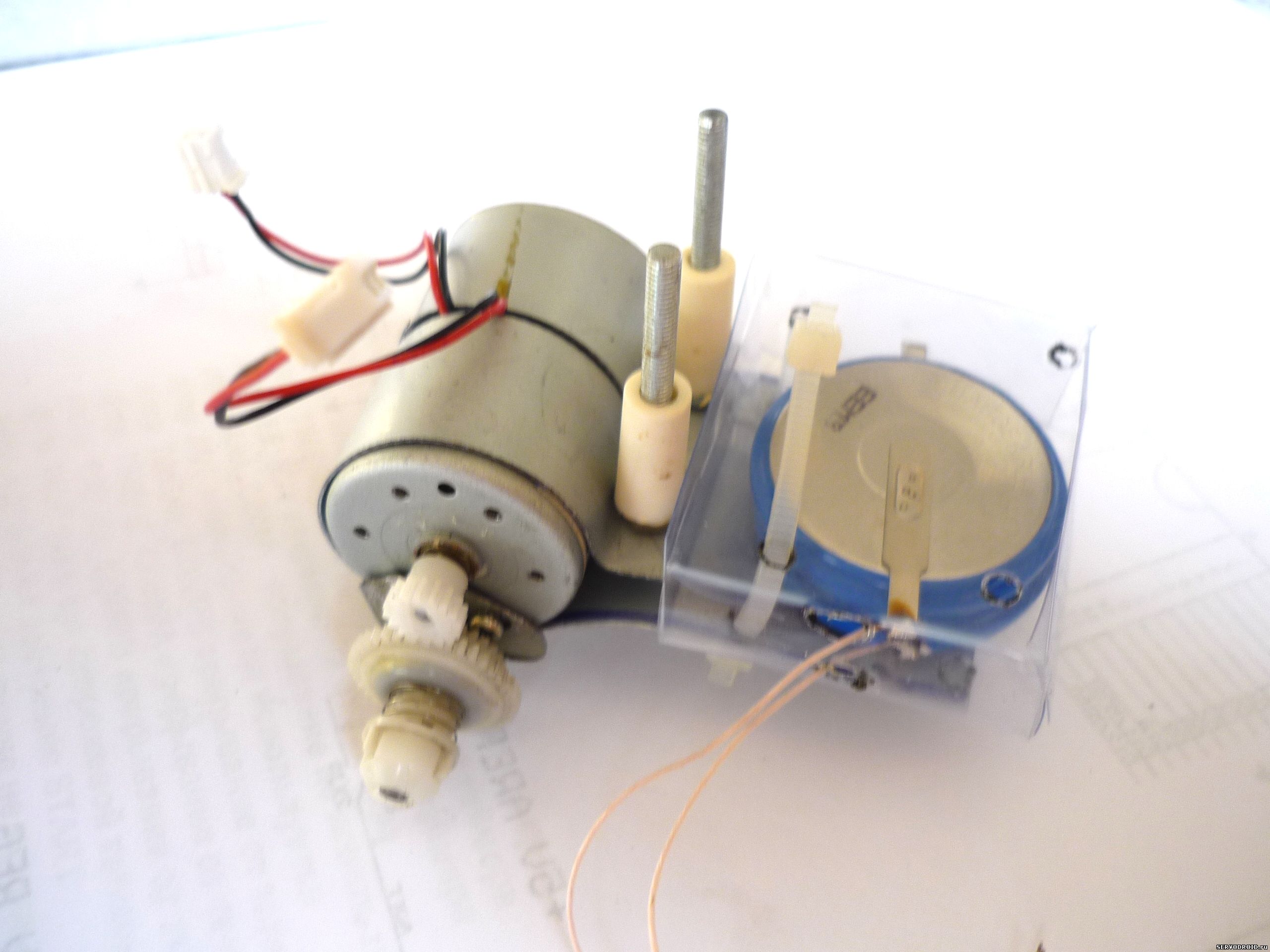
Фото 4.
Для этого изготавливают аккумуляторный отсек из твердой
обложки. В отсеке делают отверстия, через которые проходит стяжка фото 4. На
оставшуюся резьбу винтов устанавливается плата управления рис 7 фото 4.
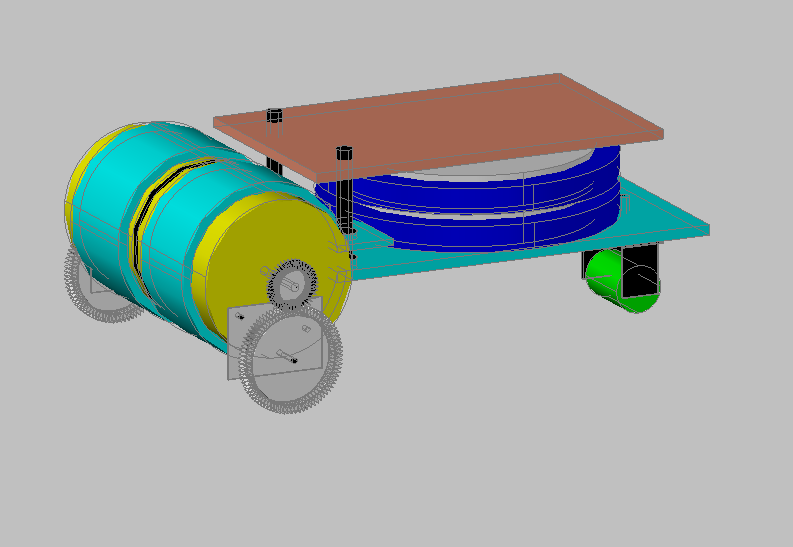
Рис. 7
Аккумуляторы имеют плоскую
поверхность. Над аккумуляторами установлена плата управления двигателями. В
случае доработки схемы над платой будет установлена плата мастера с
фотодатчиками. От аккумуляторов к плате управления подается питание через
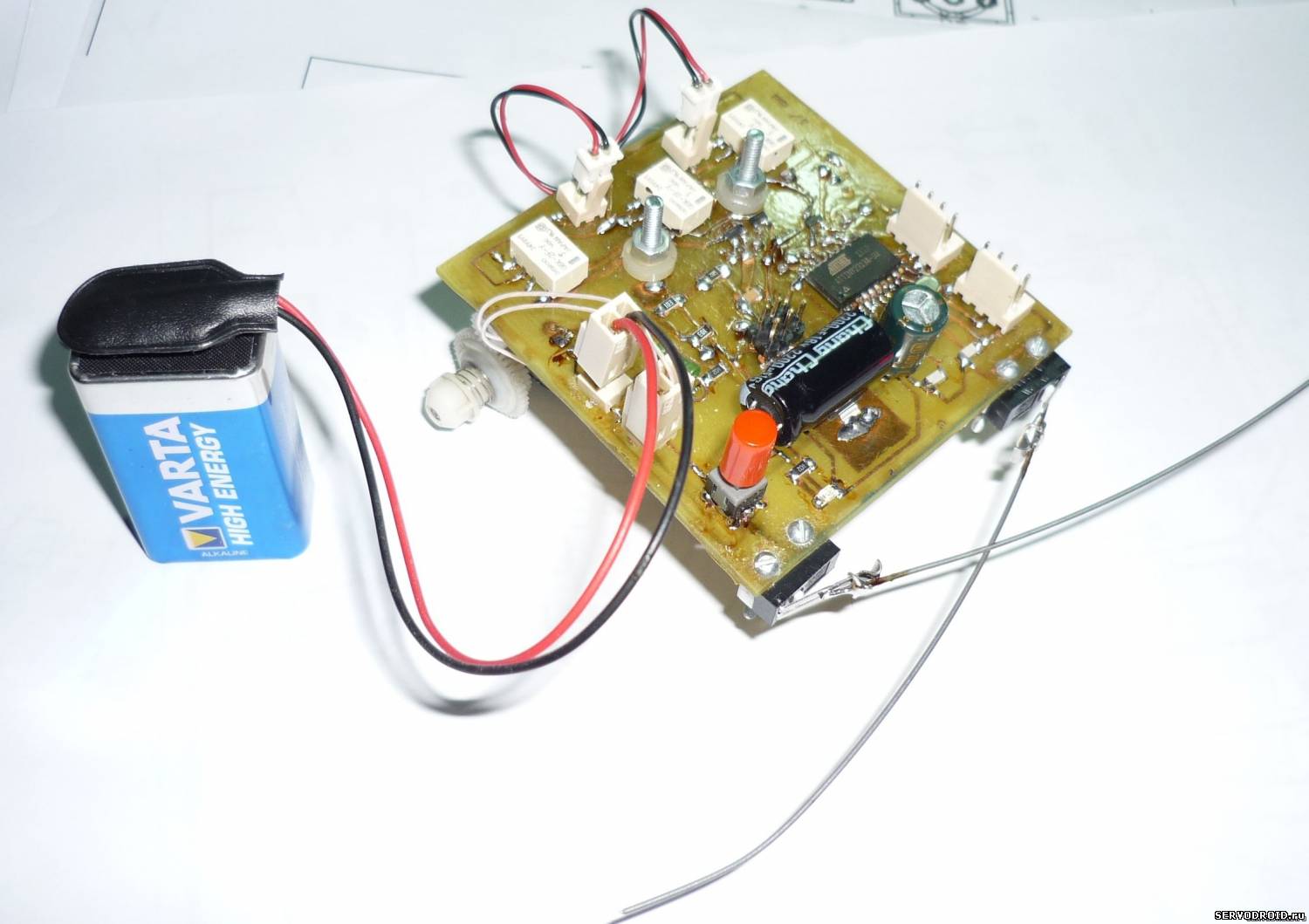
провода на разъем SL1. При
включении питания S3 на
плате управления засветится светодиод LD1, что указывает на правильность подключения фото 5.
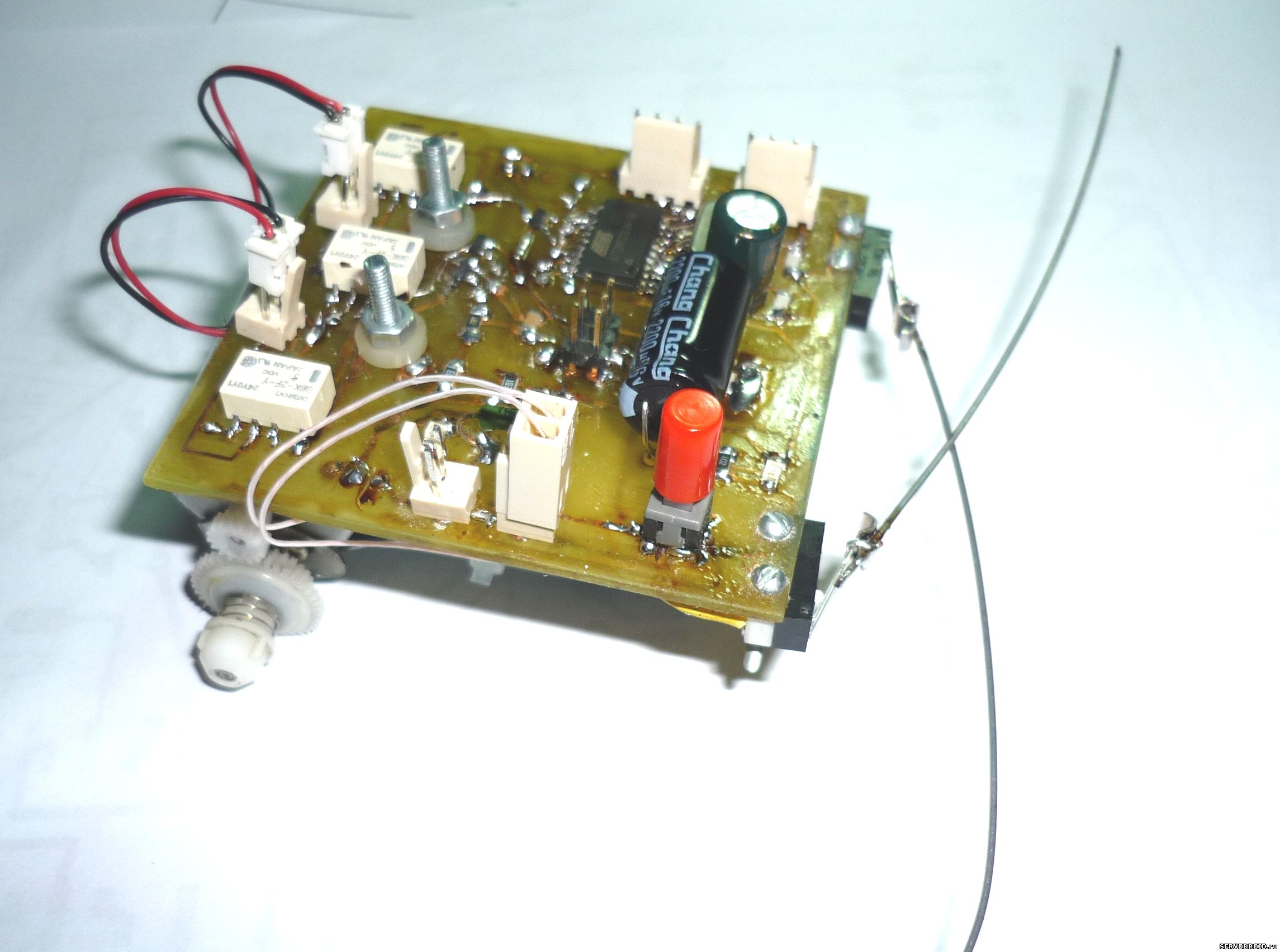
Фото 5.
Во время настройки необходимо
скоммутировать электро двигатели. Для этого платформу помещают на коробку, так
что бы колеса, не касались поверхности. После чего, включают питание и
определяют правильность вращения колес. Если колеса вращаются не по направлению
движения платформы вперед, то необходимо, отпаять провода и поменять их местами
на контактах электро двигателей.
На платформу устанавливаются микро выключатели
(датчики столкновения) фото 1. Далее проверяются срабатывание датчиков столкновения.
Для этого, в включенном состоянии платформы, необходимо нажать на контакт и
проверить, изменит направление вращения вал электро двигателя, или вращение
будет прежним. Если направление вращения не изменяется, надо проверить
соединение микро выключателя с платой управления. При настройке функций
движения платформы, можно изменить в программе направление движения и паузы
между маневрами.
8.ИСТОЧНИК ПИТАНИЯ
По истечению заряда аккумулятора, робот будет двигаться медленно и возможно
совсем остановится. Что бы зарядить аккумуляторы, необходимо выключить работа
кнопкой S3 и подключить
источник с напряжением 7,5 – 9,0 В к разъему SL5 фото 6. Во время заряда,
будет светиться светодиод LD2.
По мере заряда свечение светодиода будет уменьшаться. Когда светодиод будет
тускло гореть, значит, аккумуляторы заряжены. Робота можно снова
эксплуатировать.
9.ЭКСПЛУАТАЦИЯ
Стоимость платформы указана в таблице 1
и составляет примерно 25 евро. Робот устанавливают на середину стола или пола, на
ровную поверхность, перед препятствием. Включается питание на плате управления.
Как только робот начал движения прямо и столкнулся с препятствием, он его
начинает обходить. Если препятствие имеет возвышенность, робот может
перевернуться фото 7.
Переписывая
программы траектории движения, добиваемся управлением роботом в лабиринте и
направляем по заданной траектории. Таким образом, устраиваются соревнования по
программированию. Робот первый, преодолевший все препятствия и вышедший на
финишную прямую, считается выигравшим. Для будущих разработок можно
использовать разъем SL6. К этому разъему можно подключить инфракрасные или
ультразвуковые датчики. К разъему SL4 подключается связь с платой мастер. Плата
мастер обдумывает движения робота и контролирует питание системы. Попробуйте
самостоятельно придумать соревнование. Фантазия это полезное занятие. Удачи в
освоении МК техники!
Литература:
Datasheet. Lowsignalrelay. OmronelectroniccomponentsLLC.
May 2009
Евстифеев А.В. Микроконтроллеры AVR семейства Tiny. Руководство
пользователя. М:
Додэка-XXI, 2007.
Скачать архив с печатной платой, исходным кодом, и списком комплектующих.


 Спасибо автору !
Спасибо автору !