01:02 КИБЕРНЕТИЧЕСКАЯ МЫШЬ | ||
 Простейшую кибернетическую мышь может собрать даже новичок в робототехнике. Для сборки потребуется несколько компонентов и немного терпения. Что может кибернетическая мышь? Кибернетическая мышь будет "бежать" вдоль плинтуса стены или вокруг коробки из-под обуви. Её тактильный (чувствительный) ус-датчик способен обнаружить препятствие, например стену. А несложная электрическая схема будет управлять двумя моторами, так чтобы держать направление вдоль любого протяженного объекта (стены). $CUT$ В качестве источника питания используется всего лишь одна батарейка напряжением 1,5 вольта. Чтобы обойтись, как можно меньшим количеством деталей, в конструкции не предусмотрен выключателя питания. Для включения кибермыши устанавливают батарейку в футляр, а для выключения её вынимают. При наличии всех компонентов сборка кибермыши не займёт больше одного-двух часов. |

***
На фото.1 показан робот-мышь в сборке. Робот выполнен по технологии "свободной сборки" при которой все компоненты крепят и паяют непосредственно друг с другом, без использования печатной платы.

фото.1.нажимайте фото для просмотра в полном размере
1.ДЕТАЛИ И МАТЕРИАЛЫ.
Основные компоненты приведены далее. Дополнительно при монтажных (сборочных) работах, потребуются: термоклей с клеевым пистолетом, чёрная изолента, тонкий многожильный монтажный проводок, монтажные пласткогубцы и кусачки.
 | КОМПОНЕНТЫ КОНСТРУКЦИИ РОБОТА 1. Канцелярcкие металлические скрепки (среднего размера)-4шт. 2. Термоусадочная трубка (уменьшается в размерах при нагреве)-1шт. 3. Моторы с рабочим напряжением 1,5 вольта (проверьте батарейкой 1,5В)-2шт. 4. Батарейка 1,5 вольта, типоразмер "AA" (в народе называют "пальчиковая")-1шт. 5. Микропереключатель с металлической пластиной типа KW10-1шт. 6. Футляр односекционный для батарейки типоразмера "AA"-1шт. Фото.1 нажимайте фото для просмотра в полном размере. |
2.ИНСТРУКЦИЯ СБОРКИ РОБОТА.
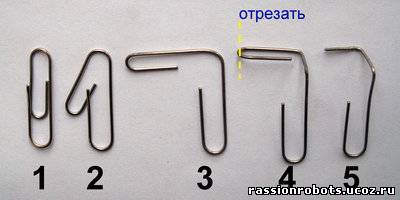
Фото.2. Изготовление шасси.
Начнём сборку робота с изготовления шасси. На шасси будут крепиться моторы, поэтому это важная часть робота. Шасси сделаем из канцелярских скрепок, всего нам потребуется две одинаковых по размеру скрепки. Посмотрите на фото.2. возьмите одну из скрепок и начинайте её разгибать (1, 2 и 3) до тех пор пока не получите угол (3). Далее сгибаем скрепку (будьте внимательны) так как показано (4) и отрезаем бокорезами лишнюю часть. У вас должно получиться, так как показано (5). Вам необходимо изготовить две таких (5) скрепки с фигурной формой. Все сгибы производите только монтажными пласткогубцами!
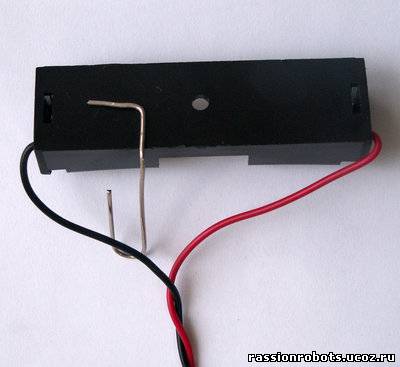
Фото.3. Изготовление шасси.
Зачем нужны фигурные изгибы скрепки? Посмотрите, на фото.3 показана примерная установка одной скрепки на футляре. Обе выгнутые вами скрепки будут крепиться на футляре с противоположных сторон. Поэтому важно, чтобы их форма точно соответствовала показанным на фотографии. В противном случае возникнут проблемы с крепежом на футляре. Во время гибки скрепок, старайтесь производить все движения медленно и плавно, так как скрепки легко ломаются при значительных изгибах! Не забывайте, вторая скрепка выгибается симметрично показанной на фото.2 (5), то есть в противоположную сторону.
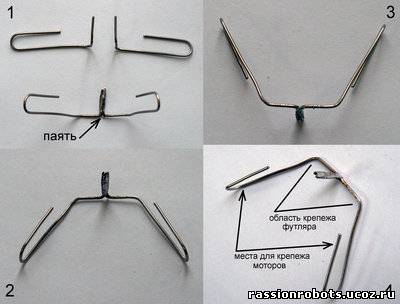
Фото.4. Изготовление шасси.
Подготовленные (выгнутые) ранее скрепки спаяйте, так как показано на фото.4. На этой же фотографии показаны спаянные вместе скрепки с разных сторон. Это поможет вам правильно соединить и спаять скрепки. Области для крепежа футляра и моторов показаны на фото.4 (4).

Фото.5. Монтаж моторов.
Напоминаю, что используемые вами моторы должны запускаться и работать от одной батарейки с напряжением 1,5 вольта. Установите шасси из скрепки, так как показано на фото.5 (1). Плотно придерживая скрепку рукой, замотайте её изолентой (2). Тоже необходимо проделать со вторым двигателем. Если оба двигателя прочно зафиксированы и не болтаются, то вы всё сделали правильно, а иначе придётся перематывать снова. Результат крепежа обоих двигателей показан на фото.5 (3).

Фото.6. Установка трубочки на ось мотора.
ЭТО ВАЖНО!!! На фото.5(1) и фото.6 показана трубочка на оси мотора. Зачем она нужна? Её надеваю на оси обоих моторов для того, чтобы при движении робот не проскальзывал, было сцепление с полом. Вместо трубочки подойдёт ролик для магнитофона диаметром 8мм-2шт.
Где их взять? Ролики можно купить в магазинах радиотоваров или от старых плееров или магнитофонов, рядом с магнитной головкой для записи.
Ещё в продаже есть термоусадочная трубка, которая при нагреве уменьшается в размерах в несколько раз! Термоусадочная трубка может быть разного цвета и диаметра. Берите с размерами чуть больше оси мотора. Наденьте её на ось мотора, и прогрейте паяльником, она обожмёт ось что нам и нужно. Как добыть трубочку, если нет возможности приобрести термоусадочную трубку? Почти все электрические провода в резиновой оплётке, её можно аккуратно снять бокорезами и у вас будет трубочка для осей моторов.

Выше приведена дополнительная фотография пары роликов для установки на оси моторов. Ролики должны быть в диаметре около 8мм. Знайте, что с роликами ваша кибермышь бегает в три раза быстрее!

Фото.7. Монтаж шасси на футляре.
Возьмите односекционный футляр для батарейки. Он должен иметь типоразмер (габариты) "AA", то есть в него должна устанавливаться пальчиковая батарейка (типоразмер "AA"). Переверните футляр закрытой частью вверх, а открытой вниз. Установите шасси с моторами, так как показано на фото.7 и залейте термоклеем среднюю указанную область. Заливку выполняйте клеевым пистолетом (фото.7, справа). Удерживайте руками шасси 1-2 минуты, так как термоклей застывает не сразу. Обратите внимание на то, что шасси устанавливают ближе к краю футляра. При отсутствии термоклея крепите шасси любыми доступными вам способами, главное чтобы получилось надёжно. У вас должно получиться, так как показано на фото.7 (слева).
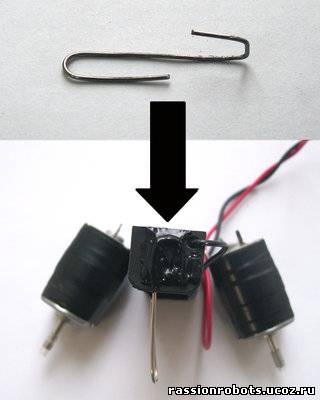
Фото.8. Монтаж передней опоры.
Изготовим переднюю опору из канцелярской скрепки. Выгните скрепку, так как показано на фото.8 (вверху). Высота передней опоры должна быть немного ниже задней части. Удерживая выгнутую скрепку рукой, зафиксируйте её с помощью клеевого пистолета в позиции, показанной на фото.8. (внизу). Подождите 1-2 минуты до полного высыхания клея. Передняя опора готова.
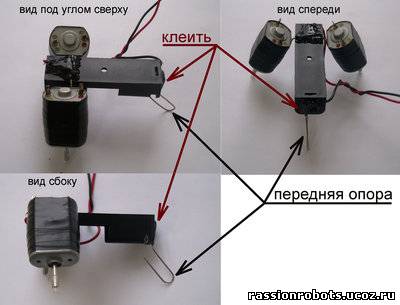
Фото.9. Монтаж передней опоры.
На фотографии показаны виды с разных ракурсов облегчающие правильную установку передней опоры. Обратите внимание на нижнюю фотографию, где показан вид сбоку. Для регулировки высоты подъёма передней части скрепку-опору можно немного отогнуть вперёд. Если у вас нет термоклея и клеевого пистолета, крепите опору так. Просверлите две дырочки на максимально возможном расстоянии в торцевой части. Проденьте заранее выгнутую скрепку через оба отверстия. Загните концы скрепки монтажными пласткогубцами. В любом случае опора не должна шататься или быть неустойчивой!
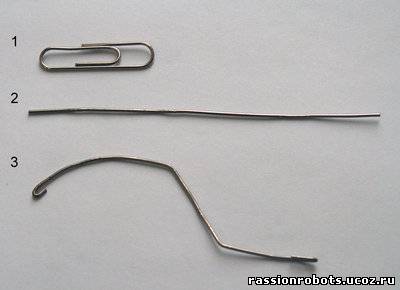
Фото.10. Изготовление и монтаж тактильного датчика-уса.
Чтобы кибермышь находила препятствие (стену) у неё должны быть чувствительные датчики-усы. Датчик препятствий в нашей конструкции называется тактильный (это означает касание) датчик-ус. Он состоит из собственно самого уса и микропереключателя, к которому этот ус присоединяется. Сначала изготовим ус из канцелярской металлической скрепки. Посмотрите на фото.10.Скрепка должна быть металлической тонкой и лёгкой (1). Осторожно разогните её в пруток (2). А теперь придайте её форму такую как показано на фото.10,(3). Обратите внимание на концы скрепки, которые тоже необходимо загнуть.

Фото.11. Изготовление и монтаж тактильного датчика-уса.
Если нет термоусадочной трубки, то крепление выполняйте следующим образом. Установите скрепку-ус на металлическую пластину и обмотайте нитками с клеем. Дайте клею высохнуть. Крепление должно быть надёжным. Тактильный датчик готов.

Фото.12. Устройство микропереключателя.
Чтобы правильно установить микропереключатель с датчиком-усом разберёмся в его конструкции. Посмотрите на фото.12 микропереключатель состоит из: пластмассового корпуса, трёх выводов (ножек), металлической пластины и нажимного штока. В пластиковом корпусе просверлено два отверстия, одно из них пригодиться для установки стопорной скобы. Чтобы легче ориентироваться, эти отверстия пронумерованы. Выводы (ножки) микропереключателя также имеют нумерацию, но уже заводскую и именно как показано на фото.12. На верхней части микропереключателя закреплена металлическая пластина. При нажатии на пластину она в свою очередь нажимает на пластмассовый шток (пупырышек), который опускается вниз и проводит переключение контактов. Теперь о том, какие контакты, с и чем замыкаются... В исходном не нажатом состоянии электрически замкнуты контакты 1 и 3 (фото.12). Когда на пластину нажимают, то контакты 1 и 3 электрически размыкаются, и замыкаются 1 и 2. Таким образом, контакт 1 подключается то 3, то к 2 контакту, то есть происходит переключение.
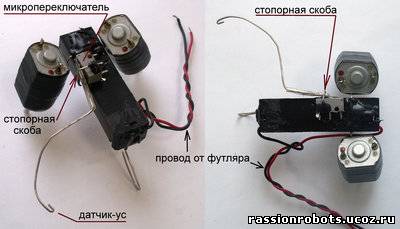
Фото.13. Установка и монтаж микропереключателя с усом.
Установите микропереключатель с усом рядом с местом крепежа моторов у края футляра. Обратите внимание на то, что микропереключатель расположен параллельно у края футляра (фото.13). Чтобы было более понятно приведены фотографии вид под углом спереди и вид сверху. Установите микропереключатель, так как показано на фото.13 и зафиксируйте (приклейте) его с помощью термоклеевого пистолета. Если у вас нет такого клея, крепите любыми доступными способами (например, винтами через отверстия), но только не занимайте отверстие номер 2. Так как оно используется для установки стопорной скобы.
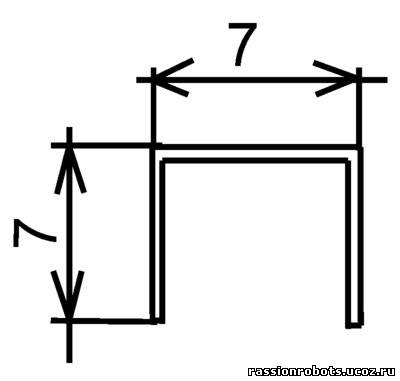
Фото.14. Чертёж стопорной скобы.
Что это такое стопорная скоба и зачем она нужна? Скоба нужна для того, чтобы ограничить свободный ход нажимной металлической пластины. То есть при её нажатии есть свободный ход, до того момента как произойдёт переключение контактов. А для робота нужна мгновенная реакция. Таким образом, при нажатии на ус без скобы робот среагировал бы не сразу. Что бы реакция была мгновенной, устанавливается стопорная скоба. Изготавливают её из канцелярской металлической скрепки. Чертёж дан на фото.14 вверху. Размеры скобы показаны на чертеже в миллиметрах. Все изгибы выполняйте при помощи монтажных пласткогубцев.
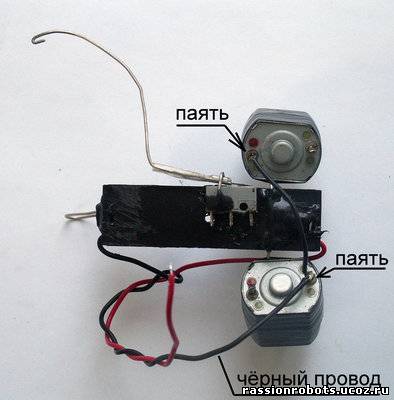
Фото.15. Подключение микропереключателя и моторов.
Найдите чёрный провод идущий от футляра. Подпаяйте его к выводам моторов, так как показано на фото.15. Паять выводы моторов желательно быстро, чтобы не расплавить пластиковые переходные муфты, в которых эти выводы удерживаются. Запомните любой мотор "не любит" длительного перегрева выводов!
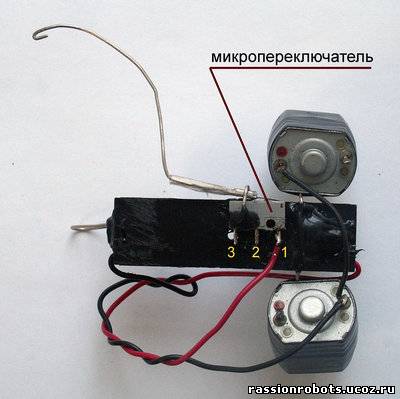
Фото.16. Подключение микропереключателя и моторов.
Свободный красный провод идущий от футляра подпаяйте к выводу 1 микропереключателя. При пайке микропереключателя помните, что его корпус выполнен из пластмассы. Длительная пайка приведёт к расплавлению корпуса, и он придёт в нерабочее состояние, то есть будет испорчен. Чтобы паять более безопасно старайтесь это делать быстрее и с большим количеством канифоли.
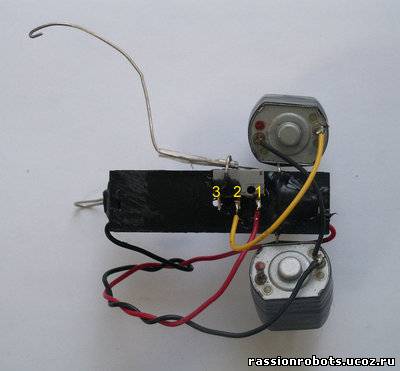
Фото.17. Подключение микропереключателя и моторов.
Чтобы вам было легче ориентироваться используйте для подключения проводки разного цвета. Теперь соединяем жёлтым проводом вывод 2 микропереключателя и вывод мотора (верхний мотор на фото.17). Пайка должна быть надёжной, чтобы ничего не оторвалось после запуска.

Фото.18. Подключение микропереключателя и моторов.
Для последнего соединения берём опять таки жёлтый провод. Соединяем этим проводом вывод 3 микропереключателя и свободный (не подключенный) вывод мотора (левый мотор на фото.18).
Пробный запуск робота. После всех выполненных соединений установите батарейку в футляр. Сразу после этого должен заработать только один мотор. Поставьте робота на ровную поверхность. Он должен всё время поворачивать вперёд-вправо, то есть двигаться по кругу. Если он поворачивается назад-вправо, то вам нужно перепаять (поменять местами) провода идущие к левому мотору. Нажмите пальцем на тактильный датчик-ус правый мотор включиться, а левый выключиться. Если этого не происходит, внимательно просмотрите все соединения по фото.19. Далее, при нажатии (и удержании) на тактильный ус правый мотор должен передвигать робота вперёд-влево. Если робот при удержании тактильного уса передвигается назад-влево, то вам необходимо перепаять (поменять местами) провода идущие к правому мотору.
Если всё собрано правильно, можно проводить испытания. Установите кибермышь рядом с коробкой или банкой или около стены, так чтобы тактильный датчик-ус еле касался стены или иного предмета. Тактильный ус будет срабатывать от столкновений, и кибермышь начнёт передвигаться вдоль стены по зигзагообразной траектории. СБОРКА ОКОНЧЕНА!
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим!
автор Алексей
Высоковольтный
www.servodroid.ru
© Внимание! Полное либо частичное копирование материала без разрешения
администрации запрещено!
Привет! Желаешь собрать не сложного в сборке робота? Ты пришел по адресу! =) Именно у нас на сайте ты сможешь найти подробные статьи по сборке шаг-за-шагом своего первого робота, а так же многих других роботов, и даже для соревнований.
Мы очень рады,
что наши статьи помогут тебе - начинающему робототехнику, освоить эту интереснейшую сферу и прокачать свой скилл в этом направлении. Также хотим отметить, что по данным статьям мы - разработчики сайта SERVODROID проводим занятия в бесплатных кружках робототехники, и нам очень нравится учить и рассказывать что такое BEAM-робототехника всем желающих.
Помоги нашему проекту! Зарегистрируйся на нашем сайте и приходи в наш Online-чат или форум и делись своими поделками и своим прогрессом - ведь именно твоя активность привлекает к робототехнике все больше и больше внимания начинающих - они смотрят на твой успех и хотят стать такими же крутыми, а нам очень приятно видеть что у вас все получается. А если что-то не получается - мы поможем ;)
Начни общаться на нашем Форуме или Онлайн-чате
[ Стать участником сайта / Авторизоваться ]
| Всего комментариев: 7 | |
|
| |




