00:49 КИБЕРНЕТИЧЕСКИЙ МУРАВЕЙ часть.1 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 КИБЕРНЕТИЧЕСКИЙ МУРАВЕЙ - это простой робот способный бежать за источником света (лучом фонарика) или обходить препятствия. Выбор режима работы осуществляют с помощью джапера. Использование доступных технологических решений позволит любому начинающему робототехнику собрать кибернетического муравья. Но это ещё не всё! Кибернетического муравья можно модифицировать как в конструкторе добавлять различные функции. *** 1.ВИДЕОТЕСТЫ КИБЕРНЕТИЧЕСКОГО МУРАВЬЯ
Через панель навигации видеоплеера можно избирательно выбрать необходимый видеофрагмент. Панель навигации доступна после запуска видео, справа внизу значок пиктограммы. Перед запуском каждого видеофрагмента автоматически выводится его название в верхнем левом углу. В нижней части окна проигрывателя слева название плейлиста и количество сгруппированных видеофрагментов.
Видеофрагменты 1-3
ВСЕ РОБОТЫ на канале SERVODROID!!! подпишись и смотри. Переход по ссылке жми!
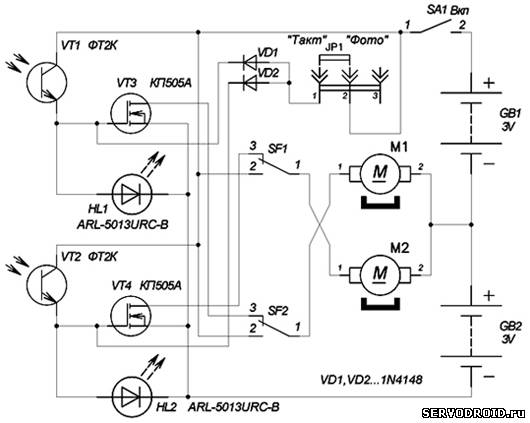
Особенность "кибернетического муравья" в том что в его схеме использовано минимального количество радиокомпонентов. Электрическая схема содержит всего лишь два фототранзистора, два транзистора, два диода и два светодиода. Робот способен передвигаться за источником света, маневрируя точно двигаться к статическому источнику света, преодолевать препятствия реверсированием валов двигателей.
Нажимайте фото для просмотра в полном размере
Алгоритм движения к свету прост. Если источник света справа, то сильнее освещён правый фототранзистор и робот поворачивает вправо. Если источник света слева, то сильнее освещён левый фототранзистор и робот поворачивает влево. Как правило в стандартной схеме, для изменения направления вращения валов двигателей установлен транзисторный мост. В схеме робота-муравья задача решена с помощью двуполярного источника питания.
Электрическая схема представлена на рис.1. Начальное положение джампера-перемычки JP1 определяет режим, в котором будет функционировать робот. Если джампер находиться в положении "Такт" показанном на схеме, то робот будет обходить препятствия. Если джампер JP1 будет в положении "Фото", то робот будет двигаться в сторону источника света.
Рассмотрим ситуацию, когда джампер JP1 будет находиться в положении "Такт" по схеме. Две составных батареи GB1 и GB2 включены последовательно. В точке их соединения относительно верхнего и нижнего потенциалов батарей будет относительный нулевой потенциал. К этому нулевому потенциалу подключены оба мотора левыми по схеме выводами. Это означает, что изменяя знак потенциала на свободных (правых по схеме) выводах моторов M1,M2 можно менять направление вращения валов любого из двигателей независимо.
После включения питания SA1 через диоды VD1,VD2 на затворы полевых транзисторов VT3,VT4 поступает положительный потенциал. Транзисторы открываются этим потенциалом и сопротивление канала сток-исток становится минимальным. Одновременно к выводам 3 микропереключателей SF1, SF2 поступает отрицательный потенциал, который проходит через нормально замкнутые контакты 1, к левым по схеме выводам 1 обоих моторов M1,M2. Так как правые по схеме выводы обоих моторов же подключены к плюсовому выводу батареи GB2, их валы начинают вращаться. Робот едет вперёд.
Корпус изготовлен из двуслойного картона. Список радиокомпонентов приведён в таблице 1. В качестве источника питания используется четыре элемента типоразмера "AA" с напряжением 1,5 вольта. На позициях источника питания устанавливают два футляра рассчитанных под батарейки указанного типоразмера. Диоды импортного производства 1N4148 можно заменить на отечественные КД522 или КД521. Высокая нагрузочная способность транзисторов КП505А позволяет подключить почти все виды низковольтных двигателей используемых в детских игрушках или ранее приобретённых.
Табл.1. Список радиокомпонентов.
ВНИМАНИЕ! Замена мигающих светодиодов обыкновенными невозможна, схема работать не будет!.
Для сборки робота потребуется гофрокартон показанный на фото.5. Его особенность в том, что внутренний слой 2 выполнен из гофрированного (собранного в гармошку) картона, запрессованного с обоих сторон листами (1 и 3 на фото.5) обыкновенного картона. Такой картон используется для упаковки компьютерной или бытовой техники. Вам нужен лист гофрокартона.
нажимайте фото для просмотра в полном размере.
Сборку робота лучше проводить с помощью инструмента показанного на фото.6. Вам потребуются монтажные плоскогубцы (2) и бокорезы (1). Для выполнения соединений (фото.7) используйте степлер и для склеивания сухой клеевой карандаш. Для эффективного соединения и устранения скольжения между компонентами подготовьте двусторонний скотч (фото.8).
Для успешной сборки точно следуйте инструкциям. Сборка робота выполняется по шаблону, который нужно распечатать на принтере, о чём будет сказано далее..
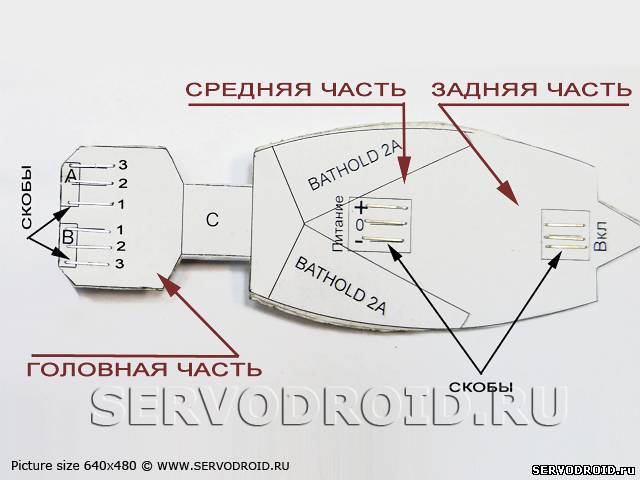
Скачайте шаблон архив которого размещён в конце страницы. Шаблон выполнен в точных натуральных размерах. После скачивания распечатайте его на листе офисной бумаги формата А4. Для изготовления корпуса возьмите гофрокартон и по шаблону переведите его контур карандашом. Вырезайте контур ножницами. На шаблоне также отмечены позиции для установки радикомпонентов и скоб степлера. На фото.9. показан корпус из гофрокартона вырезанный по шаблону (архив в конце статьи).
Промажьте корпус из гофрокартона сухим клеевым карандашом. Приложите сверху и наклеите шаблон корпуса из бумаги на картонную основу. Добейтесь равномерного приклеивания шаблона. На чертеже (фото.10) показаны позиции для установки радиокомпонентов. нажимайте фото для просмотра в полном размере.
Монтаж компонентов начинайте с установки скоб. Возьмите степлер и простеплируйте в позициях, которые показаны короткими отрезками одинаковой длины. На фото.11. с помощью степлера шесть скоб устанавливают в головной частью, три скобы в средней части и три скобы в задней части.
Шаг.2.Монтаж микропереключателей.
Установите и припаяйте микропереключатели SF1,SF2 на позиции с тыльной стороны корпуса. Позиции отмечены (фото.10) латинскими буквами A и B. На фото.12 показан микропереключатель с полоской и нумерация его выводов. Перед пайкой залудите поверхность скобы. На фото.13. показаны установленные с тыльной (противоположной) стороны микропереключатели SF1,SF2.
нажимайте фото для просмотра в полном размере.
Микропереключатели монтируют с тыльной стороны параллельно корпусу. Выводы микропереключателей должны непосредственно касаться частей скоб. После этого можно проводить напайку. Обратите внимание на то, что напайка ведётся только к одной части скрепки.
Шаг.3.Монтаж мигающих светодиодов и транзисторов.
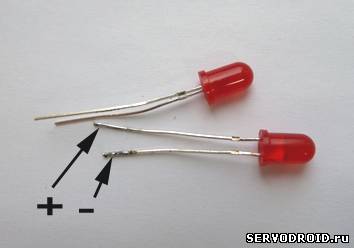
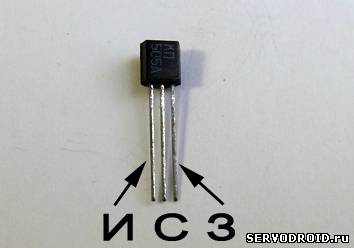
Проведите монтаж мигающих светодиодов (позиции HL1,HL2) и транзисторов КП505А (позиции VT3,VT4). Местоположение показано на фото.10. У мигающих (фото.14) светодиодов также как у обычных длинный вывод -это плюсовой, (анод) короткий-минус (катод). На фото.15 показана цоколёвка транзистора КП505 где, и-исток, с-сток, з-затвор. Возьмите в руку транзистор КП505 и посмотрите на него сверху. Его корпус при взгляде сверху будет таким же геометрически, как и на фото.10 позиции VT3,VT4. Это означает для начинающих, что можно установить транзисторы на позиции руководствуясь только геометрическими формами по фото.10.
нажимайте фото для просмотра в полном размере.
Перед установкой светодиодов HL1,HL2 и транзисторов VT3,VT4 проделайте шилом отверстия в тех местах куда будут устанавливаться выводы этих радиокомпонентов.
Соединяйте радиокомпоненты в следующем порядке. С начало отогните выводы (исток, на фото буква "И") транзисторов VT3,VT4 навстречу друг другу как на фото.16. Спаяйте истоки транзисторов вместе. Отогните с помощью монтажных плоскогубцев выводы затворов (помечены буквой "З") в сторону позиций рядом расположенных светодиодов. Вывод затвора каждого из транзисторов должен быть припаян к плюсовому выводу рядом расположенного светодиода. Оставшиеся выводы транзисторов (сток) выгибают так как показано на фото.16. Плюсовые выводы светодиодов также выгибают ориентируясь по фото.16.
Шаг.4.Установка и монтаж фототранзисторов.
На фото.17 показана цоколёвка фототранзистора ФТ-2К. Удлинённый вывод - это коллектор, укороченный - это эмиттер. Перед установкой выгните их также как на фото.17. Устанавливаем фототранзисторы VT1,VT2 ориентируясь по чертежу фото.10. На чертеже обозначены буквами "К" и "Э" отверстия для установки фототранзисторов. Обратите внимание на то, что отверстие для установки коллектора (К) каждого из фототранзисторов расположено очень близко к скобе подключенной к выводу 2 микропереключателей SF1,SF2. Это не случайно! Правильное расположение фототранзисторов показано на фото.18.
нажимайте фото для просмотра в полном размере.
Шаг.5.Монтаж фототранзисторов. Переверните корпус тыльной стороной и выполните подключение фототранзисторов VT1,VT2 по фото.19. Последовательность подключения следующая. Сначала припаивайте выводы фототранзистора VT1. Припаяйте вывод коллектора (помечен буквой К") к рядом расположенной части скобы идущей к выводу 2 микропереключателя SF1. Затем эмиттер фототранзистора VT1 припаивайте к плюсовому выводу светодиода HL1. Отгибайте выводы этих радиокомпонентов навстречу друг другу, тогда соединение легче выполнить.
Аналогично припаивают выводы фототранзистора VT2. Паяйте вывод коллектора к рядом расположенной части скобы идущей к выводу 2 микропереключателя SF2. Затем эмиттер фототранзистора VT2 припаивайте к плюсовому выводу светодиода HL2.
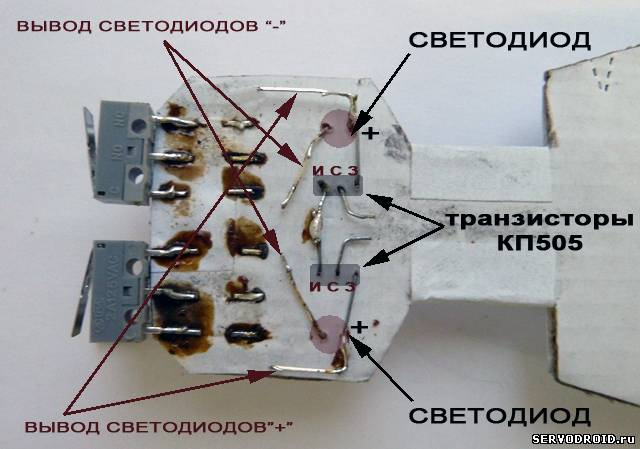
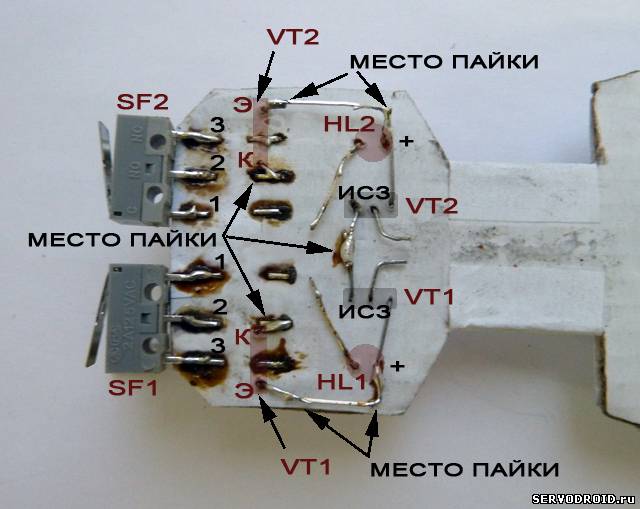 Фото.19.Монтаж фототранзисторов. Нажать фото для увеличения.
На фото.19. позиции радиокомпонентов помечены полупрозрачными прямоугольниками (для фототранзисторов и транзисторов) и кругами (для светодиодов). Цифрами 1,2,3 нумерация выводов микропереключателей SF1,SF2. Чёрными стрелками показаны места соединений выводов радиодеталей.
Шаг.6.Заключительный монтаж светодиодов и транзисторов. Выполняйте подключение минусовых (катодов) выводов светодиодов HL1,HL2. Припаяйте минусовые выводы с истоками обоих транзисторов VT3,VT4 (фото.20). Выполните соединения стоков транзисторов VT3,VT4 и выводов 3 микропереключателей SF1,SF2 монтажным проводом (на фото жёлтого цвета). Обратите внимание на то, что жёлтый провод припаивают к скобам, которые соединены с выводами 3 микропереключателей. Места пайки показаны красными стрелками.
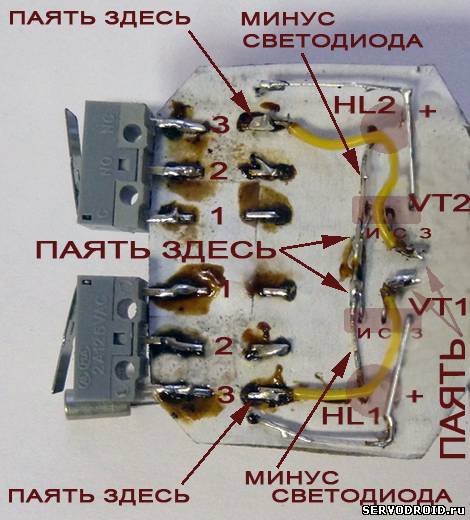 Фото.20.Монтаж светодиодов и транзисторов. Нажать фото для увеличения.
Шаг.7.Изготовление и монтаж силовой рамы. На этом этапе изготовим силовую раму на которой будут установлены моторы. А затем продолжим подключать радиокомпоненты по схеме рис.1. На чертеже шаблона в архиве в конце статьи часть.1 найдите рисунок силовой рамы. Чертёж подписан, поэтому найти его не составит труда. Вырезайте чертёж силовой рамы по контуру. Затем нужно перевести его контуры на гофрокартон. Далее вырезайте по контуру гофрокартон. Промазывайте его сухим клеевым карандашом и приклейте шаблон. После склеивания у вас должна получиться такая силовая рама как показано на фото.21.
 Фото.21.Приклеивание шаблона на гофрокартон.Нажать фото для увеличения.
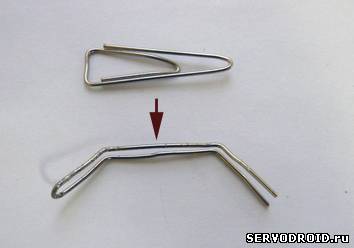
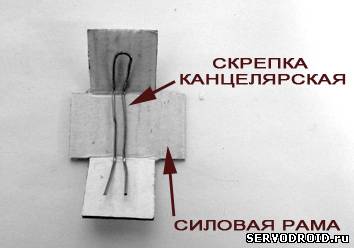
Теперь необходимо укрепить силовую раму, так как жёсткости картона недостаточно, чтобы выдержать нагрузку от массивных моторов. Для укрепления используем металлическую канцелярскую скрепку (фото.22). Рекомендуется все операции по сгибу скрепки проводить монтажными плоскогубцами.
Выгните скрепку в пруток и сложите пополам. Затем придайте скрепке такую же форму как на фото.22, фото.23. Поместите скрепку на силовую раму с тыльной стороны (фото.24). Возьмите степлер и скрепите в местах показанных на фото.25. для увеличения нажимайте на фотографии.
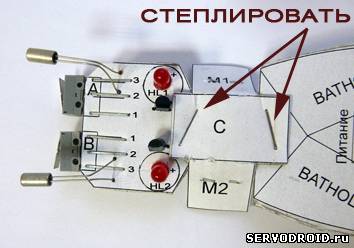
После закрепления степлером силовая рама станет достаточно крепкой, для того чтобы выдержать нагрузки (фото.26,Фото27). Обратите внимание на то, что скрепка размещается с тыльной стороны. А степлирование проводят с внутренней (нижней) стороны силовой рамы (фото.26,фото.27). Наложите сверху силовую раму на позицию "C" корпуса и степлируйте в показанных стрелками местах на фото.28. Обратите внимание на расположение скоб степлера, они расположены под углом. Именно такое расположение позволяет провести степлирование. Чтобы скобы в местах соединений не болтались, сожмите их плоскогубцами.
для увеличения нажимайте на фотографии.
Шаг.8.Монтаж футляров для батареек.
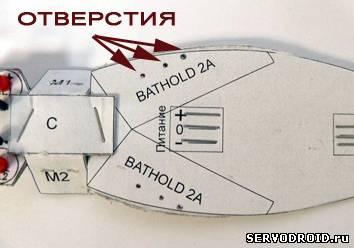
Найдите позиции футляров для батареек, они обозначены как BATHOLD. Всего на робота необходимо установить два двухсекционных футляра, которые расположены с правой и левой сторон в средней части корпуса (фото.10).
Футляр для батареек имеет несколько отверстий в центре (фото.29) найдите три отверстия в центре. Установите футляр на позицию корпуса робота и отметьте отверстия карандашом. Проколите эти отверстия шилом в корпусе (фото.30). Теперь необходимо устранить проскальзывание футляров. Сделать это можно прикрепив на позиции для установки футляров прямоугольники из двустороннего скотча. для увеличения нажимайте на фотографии.
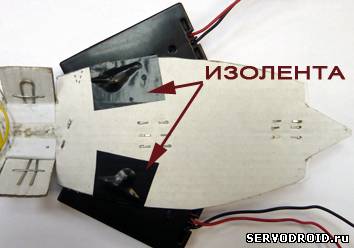
Установите футляры на позиции и скрепите его с корпусом толстым одножильным медным проводом марки ПЭЛ. Такой провод можно взять от старого трансформатора. Проденьте провод несколько раз через отверстия и прикрутите его (фото.32, вид сверху и фото.33, вид снизу). Чтобы в дальнейшем скрутка провода не задевала за предметы заклейте её отрезком изоленты. Лучшим вариантом будет импортная изолента, так как её поверхность имеет хорошие клейкие свойства.
для увеличения нажимайте на фотографии.
Шаг.9.Подключение источников питания (батареек).
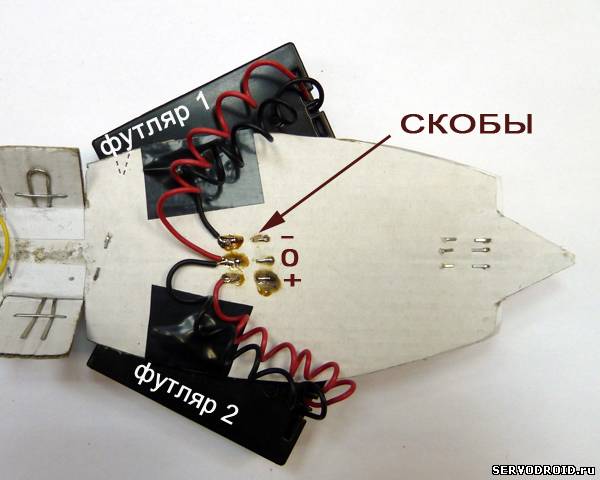
Не проводите загрузки батареек в футляры! Переверните робота тыльной стороной к верху. Найдите три рядом расположенные скобы степлера (на фото.35 обозначены полупрозрачным кружком). Подключение выводов идущих от футляров с батарейками будет проводиться на эти скобы. От каждого футляра идут два провода: красный (плюс) и чёрный (минус). Идущие провода как правило длинные, чтобы их не обрезать и придать оригинальный вид накрутите каждый из проводков на стержень от гелиевой ручки. Снимите накрученный провод с гелиевого стержня и он примет форму пружинки. Проделайте это с красным и чётным проводками как на фото.35.
На фото.35. выходящий из "нижнего" футляра чёрный провод помечен цифрой "1", красный помечен цифрой "2". Для "верхнего" по фотографии футляра чёрный провод помечен цифрой "3", красный помечен цифрой "4". На фотографии хорошо видны скобы к которым припаивают эти провода. Полное подключение выводов футляров показано на фото.36. К центральной скобе подпаивают плюс футляра 1 (красный провод) и минус футляра 2 (чёрный провод). Эта скоба обозначена как "0" -это общий потенциал. К верхней (по фотографии) скобе подпаивают минус (чёрный провод) футляра 1. Эта скоба подключения минуса "-" от источника питания. К нижней (по фотографии) скобе подпаивают плюс (красный провод) футляра 2. Эта скоба подключения плюса "+" от источника питания. Для того чтобы упростить процедуру подключения выводов от футляров на верхней стороне корпуса рядом с указанными скобами нанесена полярность (фото.37). для увеличения нажимайте на фотографии.
Скачать архив шаблонов Пароль к архиву: ant353
ПРОДОЛЖЕНИЕ В СЛЕДУЮЩЕЙ ЧАСТИ...
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
























| Всего комментариев: 9 | |


| |

 надобы взять на заметку
надобы взять на заметку



 Каждое спаянное звено проверьте на разрыв - пошатайте контакт и возможно заметите что он отвалился.
Каждое спаянное звено проверьте на разрыв - пошатайте контакт и возможно заметите что он отвалился.