02:27 КИБЕРНЕТИЧЕСКИЙ МУРАВЕЙ часть.2 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 КИБЕРНЕТИЧЕСКИЙ МУРАВЕЙ - это простой робот способный бежать за источником света (лучом фонарика) или обходить препятствия. Выбор режима работы осуществляют с помощью джапера. Использование доступных технологических решений позволит любому начинающему робототехнику собрать кибернетического муравья. Но это ещё не всё! Кибернетического муравья можно модифицировать как в конструкторе добавлять различные функции.
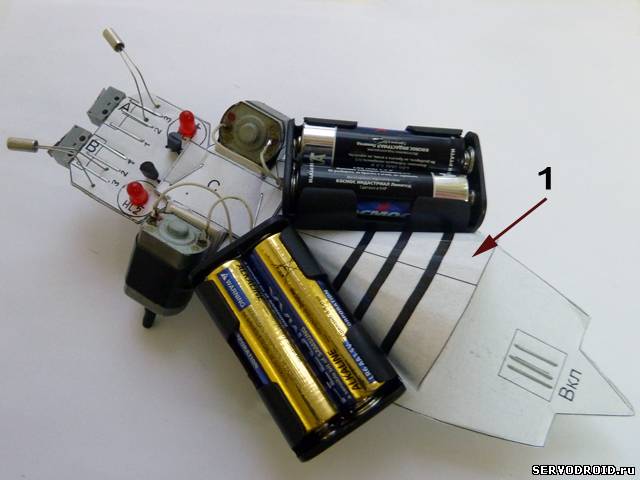
На позицию выключателя питания устанавливают переключатель (фото.38) имеющий три активных контакта и два корпусных. Его монтаж выполняют к трём скобам находящихся в задней части с нижней стороны корпуса. Для облегчения поиска позиции скоб помечены надписью "Вкл" (фото.39). Припаивают только 2.3.4 контакты переключателя. Контакты 1 и 5 идущие от корпуса не припаивают!
ВНИМАНИЕ! Выключатель питания необходимо расположить перпендикулярно корпусу робота. Его ручка служит третей точкой опоры для робота. После монтажа выключателя питания припаяйте красный провод к плюсу (+) источника питания (к скобе). Второй конец провода припаивайте к скобе соединённой с выключателем питания (точка "A") (фото.40).
для увеличения нажимайте на фотографии.
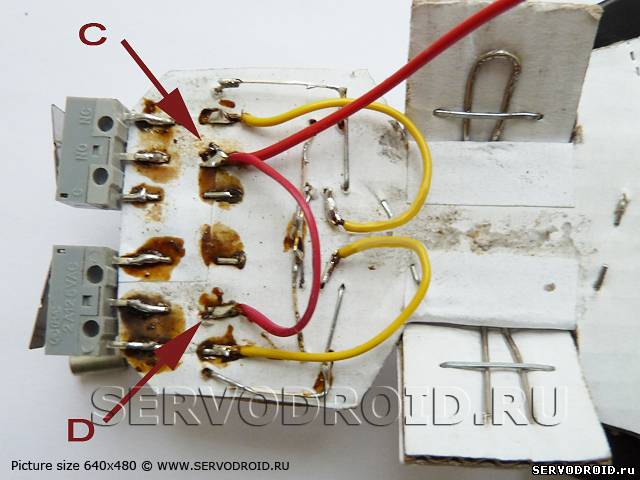
Возьмите ещё один красный провод и припаяйте один конец так, чтобы он соединил две рядом расположенные скобы (фото.41). Место соединения помечено точкой "B". Второй конец красного провода припаивайте в головной части робота к точке "C", а затем и к точке "D" отрезком провода, того же цвета. (фото.41). По электрической схеме -это соединение выключателя питания с выводами "2" обоих микропереключателей SF1,SF2. Цветные провода необходимы для того, чтобы не запутаться в соединениях, так как их предстоит сделать немало.
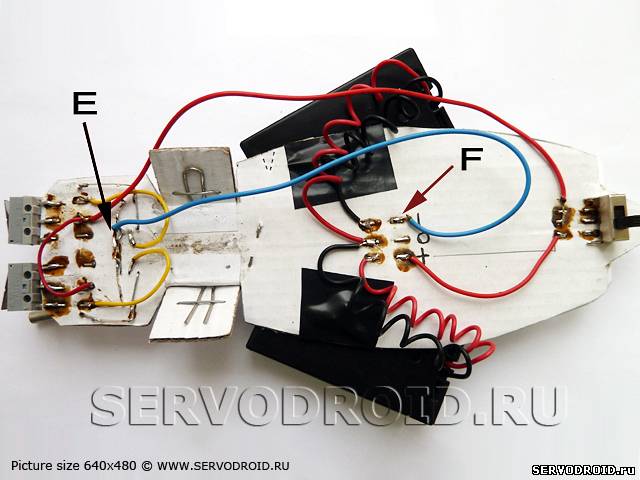
Возьмите синий провод и припаяйте один его конец к минусу источника питания (точка "F"). Второй конец синего провода припаяйте к точке "E" где соединяются минусы светодиодов и истоки транзисторов VT3,VT4 (КП505). для увеличения нажимайте на фотографии.
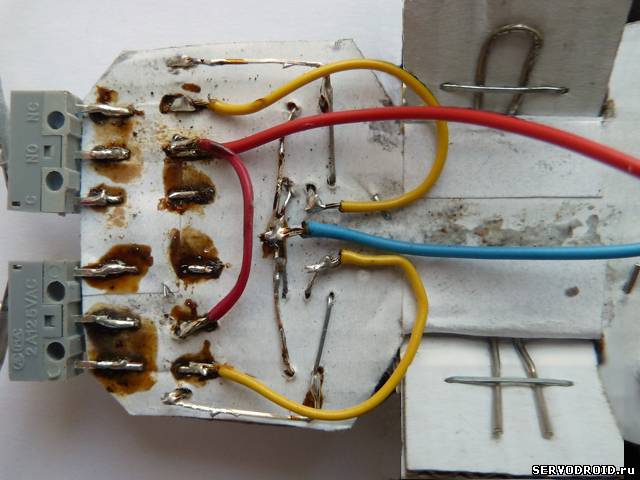
На фото.44. показаны места монтажа красного и синего провода в головной части робота. Для дальнейших подключений необходимо установить моторы (фото.45). Шаг.11.Монтаж двигателей. На позиции для моторов приклейте прямоугольники из двустороннего скотча. (1) Это поможет устранить проскальзывание и повысит надёжность крепления (фото.46). для увеличения нажимайте на фотографии.
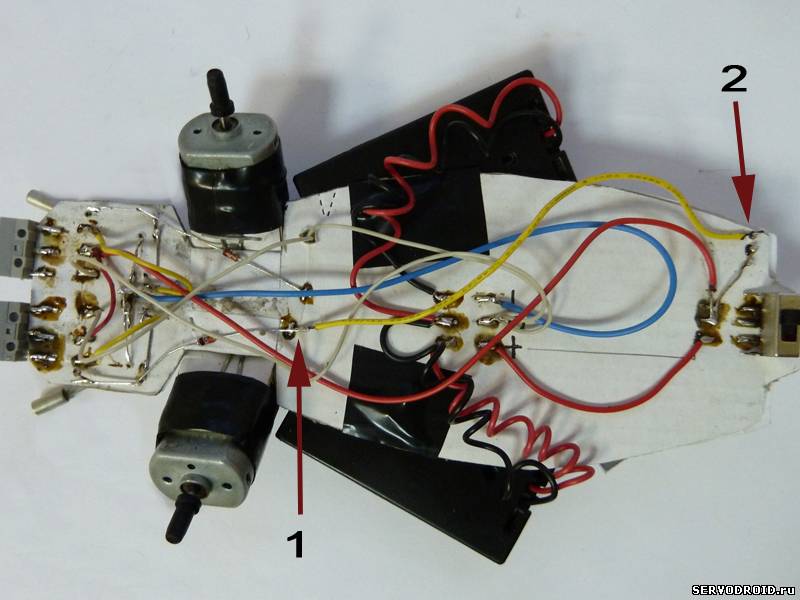
Переверните робота и продолжите подключение моторов. Определимся заранее, что выводами моторов будут называться проводки подключенные к моторам. На фото.50. показаны следующие обозначения: M1M2-мотор1 и мотор2; B1B2M1-вывод1 и вывод2 мотора M1; B1B2M2-вывод1 и вывод2 мотора M2; B2M1,B2M2"O"-вывод1 и вывод2 моторов M1 и M2 подключены к общему выводу; B1M1-вывод1 мотора M1; B1M2- вывод1 мотора M2.
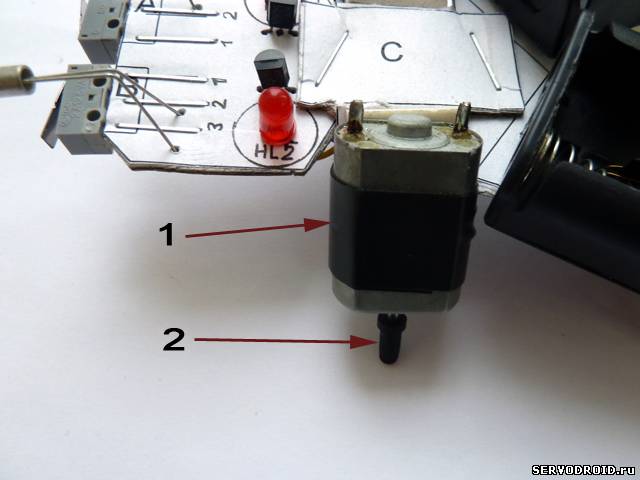
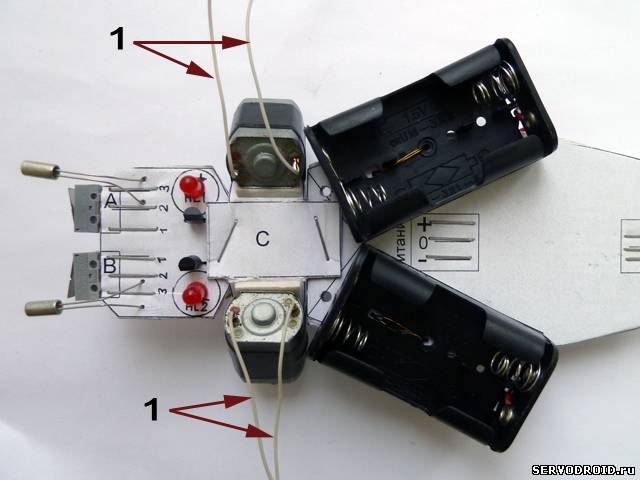
Установите моторы на позиции и зафиксируйте их изоляционной лентой (1) любого цвета (фото.47). На валы двигателей наденьте резиновые трубочки (2) от "нового" гелиевого стержня (фото.47). Припаяйте к выводам каждого мотора по два белых провода (1) (фото.48). Просверлите два отверстия (1) рядом с футлярами на позициях "Отв.". Через отверстия проденьте провода подключения моторов(фото.49).
Начните с подключения вывода1 от мотора M1 и вывода1 от мотора M2. Припаяйте выводы в головной части (фото.50) перекрёстно к скобам подпаянным к выводам "1" микропереключателей SF1,SF2. Оставшиеся выводы2 обоих моторов M1,M2 соединяют вместе и припаивают к общему выводу "O" источника питания на скобу. 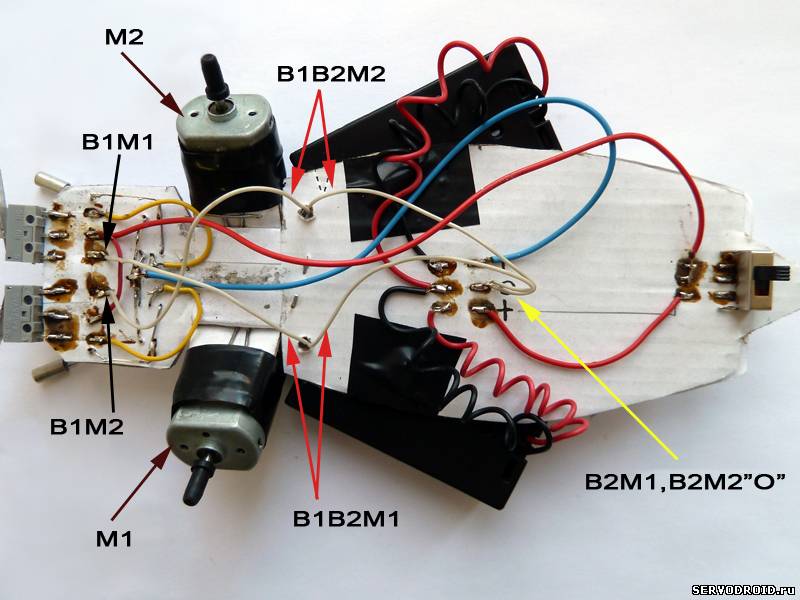 Фото.50.Подключение выводов моторов. Нажмите для увеличения. Шаг.12.Изготовление и монтаж панциря.
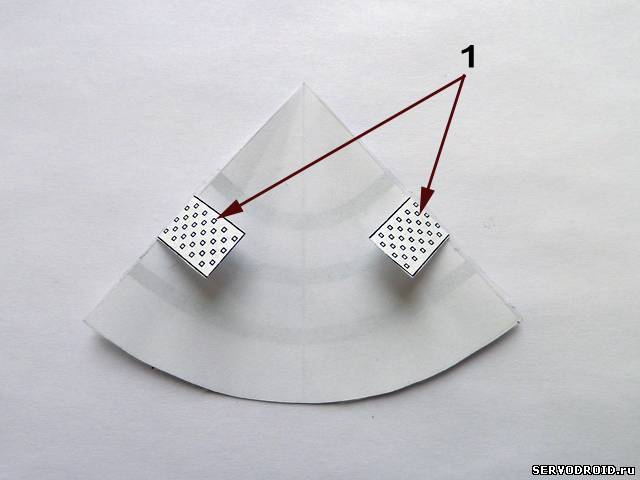
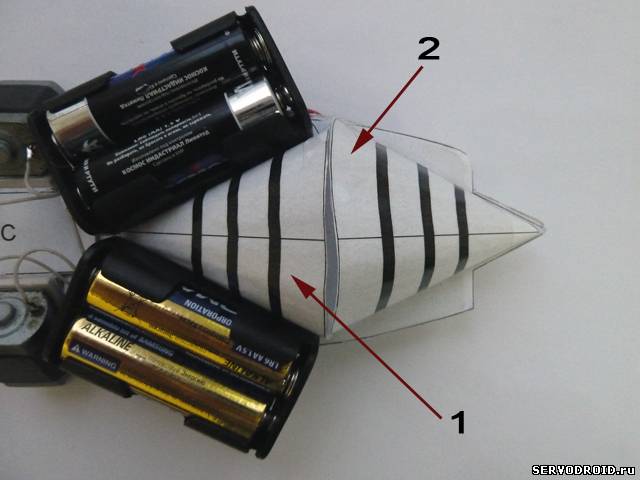
Возьмите рисунок шаблонов и с помощью ножниц вырежьте чертёж панциря (1 и 2 части). Загните крепёжные полоски (1) как на фото.51. Чтобы панцирь стал водонепроницаемым и более прочным приклейте сверху полоску широкого скотча. (1) (фото.52). Это нужно делать очень аккуратно, чтобы скотч не сморщился и не коробил бумагу. Для придания формы сворачивайте одну половинку панциря в пирамидку (фото.53). Тоже проделайте со второй частью панциря.
для увеличения нажимайте на фотографии.
Установите половинку (1) панциря на позицию и приклейте за полоски сухим клеевым карандашом (фото.54,фото.55). Затем установите на позицию вторую (2) половинку панциря и приклейте (фото.56). Дайте клею некоторое время высохнуть. Обратите внимание на то, что между половинками есть некоторое расстояние. Его можно заклеить узкой полоской скотча скрепив обе половинки.
для увеличения нажимайте на фотографии.
Шаг.13.Монтаж джампера переключения режимов.
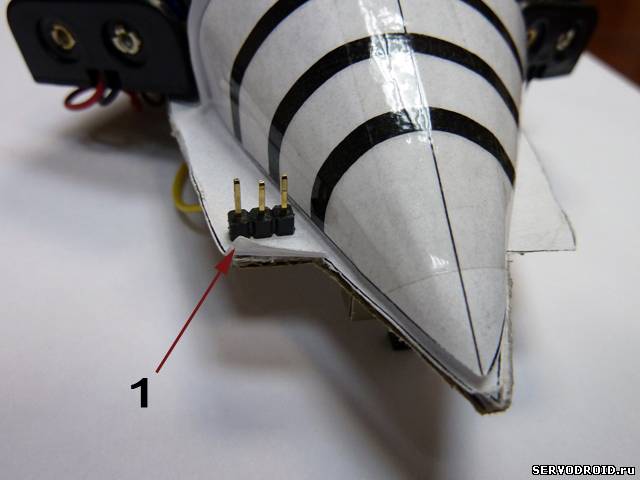
Установите трёхпозиционный джампер как показано на фото.57. В положении "Tactil" когда замкнуты два крайних контакта (фото.58) работают только тактильные усы и робот реагирует на столкновения обходя предметы. В положении "Light" (фото.59) при замкнутых двух других штырьков джампера робот бежит за источником света.
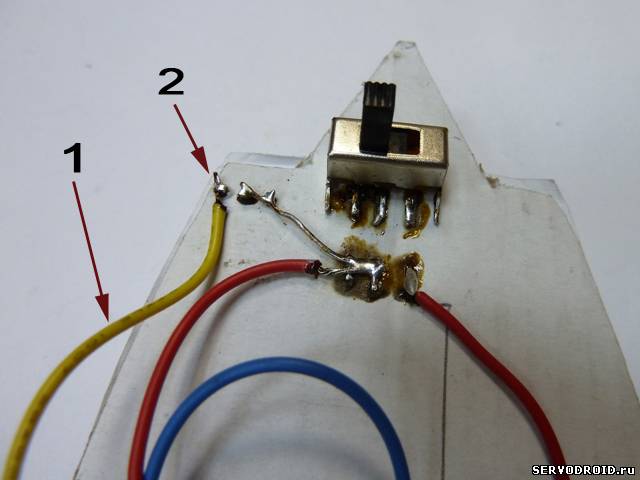
Переверните робота и подпаяйте к джамперу одножильный провод (1) так чтобы соединить два вывода джампера (2) вместе. (фото.60) В качестве одножильного провода удобно использовать вывод от резистора.
Возьмите длинный провод (1) жёлтого цвета и подпаяйте к свободному выводу (2) джампера (фото.61). Второй конец жёлтого провода необходимо будет припаять к диоду..но! монтаж диодов мы не выполняли. Поэтому временно отложим пайку жёлтого провода и выполним монтаж диодов.
для увеличения нажимайте на фотографии.
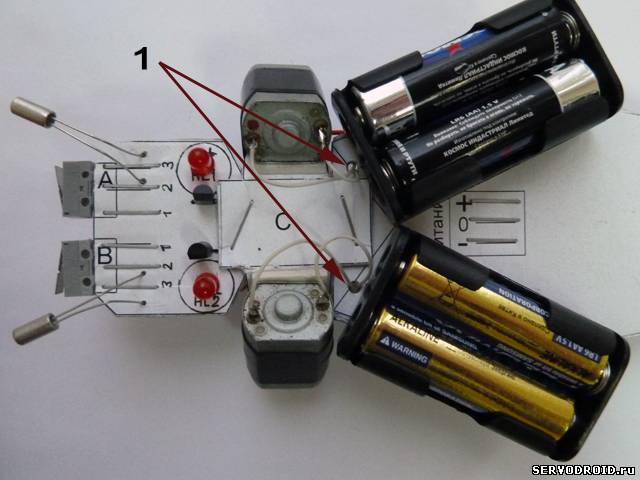
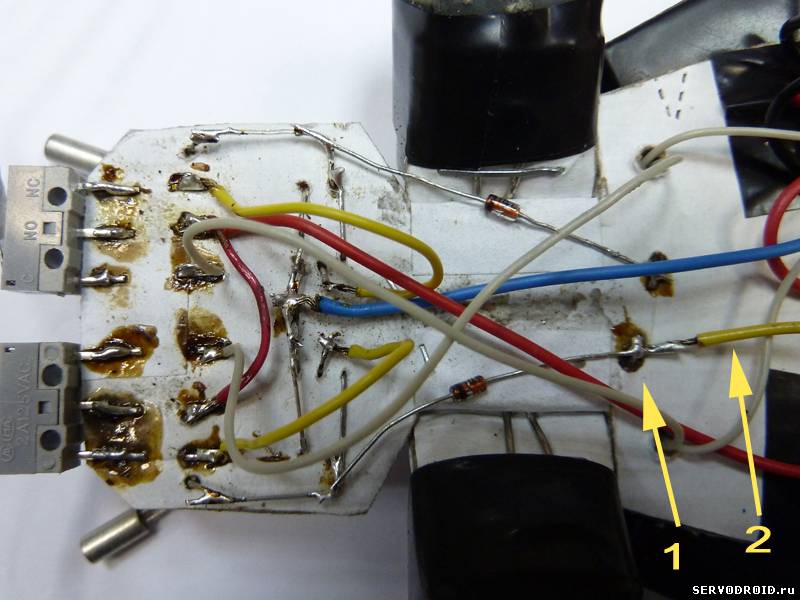
Внимательно посмотрите на фото.62. На фотографии показаны позиции для установки и монтажа импортных диодов 1N4148. Аналог отечественные КД521 или КД522. На фотографии импортные диоды. При замене на отечественные учитывайте тот факт, что чёрная полоска отечественных диодов означает плюсовой вывод (анод). А у импортных наоборот, чёрная полоска означает минусовой вывод (катод).
На фото.62. стрелками помечены точки подключения диодов. Красные стрелки указывают на подключение диодов (минусовые выводы) к плюсовым выводам светодиодов. Жёлтые стрелки указывают на подключение к одной скобе. Это означает, что плюсовые выводы диодов электрически соединены вместе. для увеличения нажимайте на фотографии.
Теперь пора подключить второй конец жёлтого провода идущего от джампера. На фото.63. показано подключение жёлтого провода (1) к выводу плюсовому диода(1). На фото.64. полностью показано подключение жёлтого провода в точках 1 и 2.
для увеличения нажимайте на фотографии.
Шаг.14.Изготовление и монтаж тактильных усов.
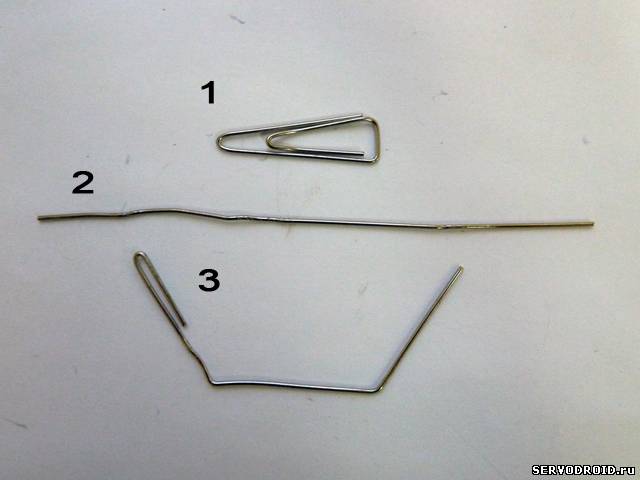
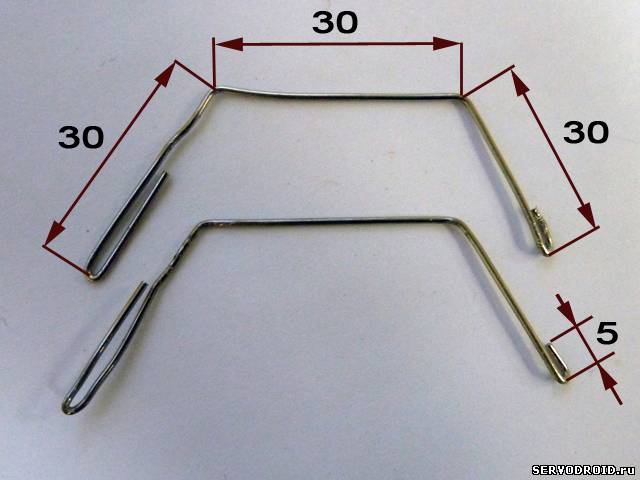
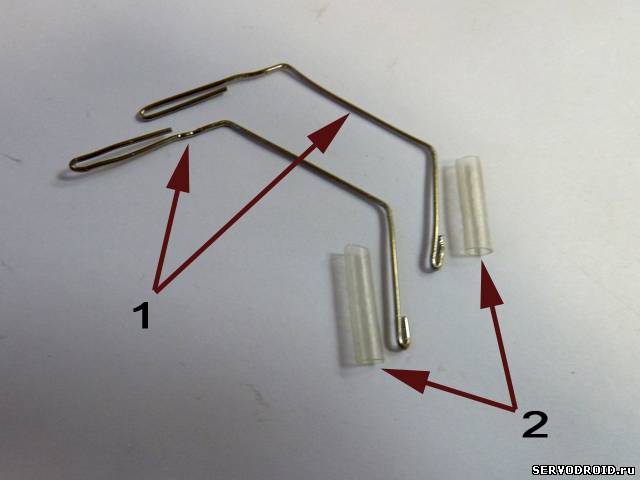
Тактильные усы изготавливают из канцелярских скрепок. Вам потребуется две скрепки, которые необходимо разогнуть в прямую линию. Придайте форму скрепке как на фото.65. Загните один конец скрепки на длину примерно чуть более половины, а второй конец на 5мм (фото.66). Точно также выгните вторую скрепку.
Для надёжной фиксации на металлических пластинах микропереключателей воспользуйтесь термоусадочными трубками. Внешне -это обычная трубка, которая при нагревании, допустим паяльником уменьшается в размерах в несколько раз! Это свойство термоусадочной трубки удобно использовать для фиксации или изоляции выводов, монтажного провода и т.д. Термоусадочная трубка может быть любого цвета, например: синего, белого молочного , прозрачного или чёрного. В нашем случае цвет значения не имеет. На фото.67. показаны тактильные усы (1) и термоусадочная трубка (2). для увеличения нажимайте на фотографии.
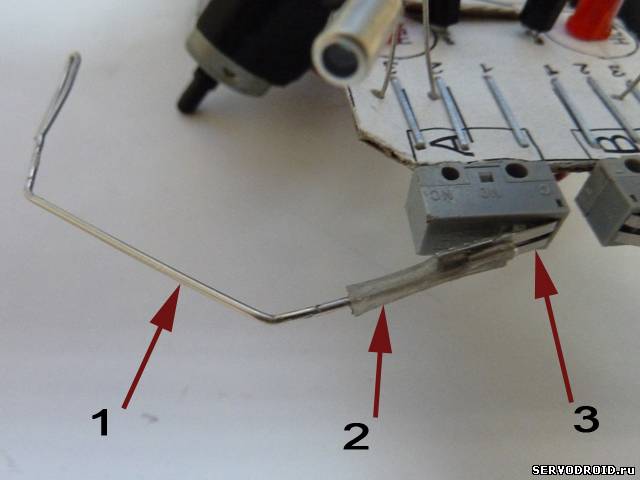
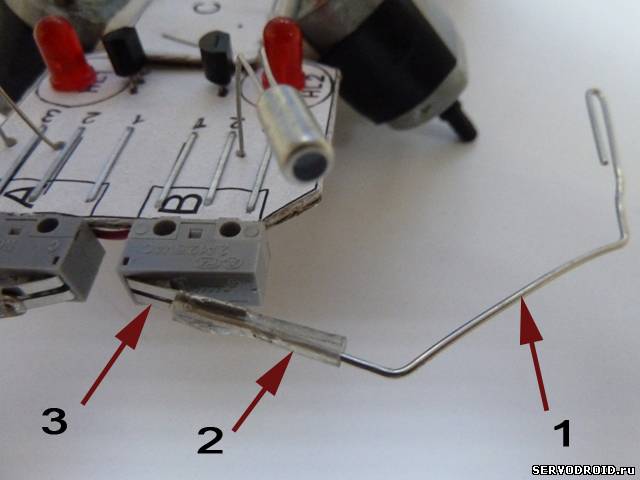
Наденьте термоусадочную трубку (2) на металлическую пластину (3) микровыключателя как показано на фото.68. Затем установите тактильный ус меньшим сгибом в термоусадочную трубку. Быстро водите жалом паяльника по поверхности термотрубки стараясь не перегреть, иначе она растрескается. После усадки должно пройти некоторое время (около 1 минуты) чтобы термоусадочная трубка остыла. Выполните закрепление тактильных усов с помощью термоусадочной трубки для левого и правого микровыключателей (фото.69). После того как фиксирующая термотрубка остынет крепление будет достаточно надёжным. Осталось только покрасить тактильные усы в чёрный цвет. Сделать это проще всего маркером для рисования печатных плат (фото.70).
для увеличения нажимайте на фотографии.
Установите батарейки в футляр и проведите пробный запуск. Установите джампер переключения режимов в положение "Tactil". Включите питание. Если робот едет назад или поворачивает назад одним из моторов, то определите какой из моторов вращается в противоположную сторону и перепаяйте местами провода идущие к его выводам. Далее переведите джампер в положение "Light". Для проверки рекомендуется использовать фонарик, так как настольная лампа даёт рассеянный свет в разных направлениях, что нежелательно при настройке или тестировании. Если робот не едет за лучом света, проверьте правильность монтажа фототранзисторов. Если робот передвигается за лучом света, то все инструкции выполнены верно и ошибок в монтаже нет. СБОРКА ОКОНЧЕНА!
Если у ВАС возникли вопросы пишите на ФОРУМЕ или в Online чат по робототехнике мы их обсудим! автор Алексей Высоковольтный www.servodroid.ru © Внимание! Полное либо частичное копирование материала без разрешения администрации запрещено!
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||














| Всего комментариев: 0 | |